自動(dòng)巡線與人工遙控相結(jié)合的太陽(yáng)能運(yùn)輸小車

引言
本文設(shè)計(jì)的智能小車是一種集實(shí)時(shí)采集傳感器信號(hào)、自動(dòng)方向控制及速度調(diào)節(jié)等技術(shù)于一體的自動(dòng)小車。系統(tǒng)通過(guò)單片機(jī)進(jìn)行采集信號(hào)和控制分析。采集的信號(hào)包括引導(dǎo)線檢測(cè)電路的信號(hào),碼盤(pán)檢測(cè)的信號(hào),紅外遙控的信號(hào)等。把分析結(jié)果與預(yù)設(shè)值相對(duì)比,從而控制小車的運(yùn)行情況。小車可以把貨物從A地自動(dòng)運(yùn)輸?shù)紹地。當(dāng)小車檢測(cè)到有貨物時(shí)自動(dòng)前行,到達(dá)目的地時(shí)自動(dòng)停止。當(dāng)貨物被取下時(shí)小車自動(dòng)回到原始的位置,重新開(kāi)始下一次的運(yùn)輸。系統(tǒng)主要由以下幾個(gè)模塊組成:?jiǎn)纹瑱C(jī)模塊,驅(qū)動(dòng)電路模塊,引導(dǎo)線檢測(cè)模塊,碼盤(pán)測(cè)速模塊,太陽(yáng)能充放電控制模塊,紅外遙控信號(hào)模塊。必要時(shí)還可以將系統(tǒng)檢測(cè)到的信息傳遞給上位機(jī)進(jìn)行監(jiān)測(cè)。系統(tǒng)組成原理框圖如圖1所示:
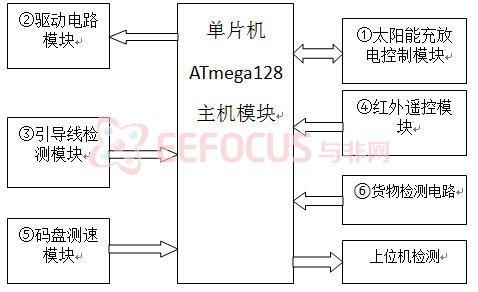
圖1 系統(tǒng)組成原理框圖
1.系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)采用c語(yǔ)言進(jìn)行程序設(shè)計(jì),具有很強(qiáng)的可操作性。并且主要有主程序和
中斷子程序構(gòu)成。主程序控制框圖2所示:
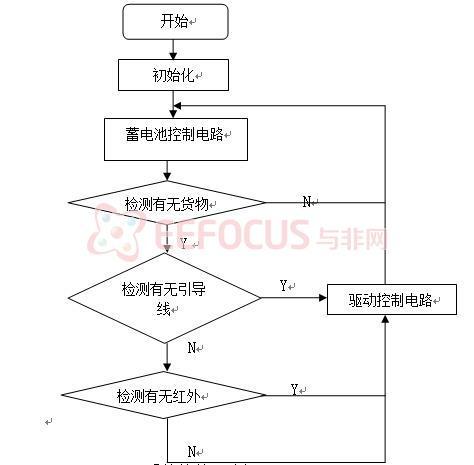
圖2 系統(tǒng)軟件設(shè)計(jì)框圖
2.各部分硬件組成及功能實(shí)現(xiàn)
I太陽(yáng)能充放電控制模塊
組成:太陽(yáng)能光伏電池陣列,蓄電池,充放電控制系統(tǒng),AVR單片機(jī)。
電源的選擇
太陽(yáng)能小車光伏供電系統(tǒng)的關(guān)鍵是太陽(yáng)能電池和蓄電池之間的合理配置。光伏電池通常由單晶硅、多晶硅、非晶硅和化合物等材料組成,目前國(guó)內(nèi)光伏材料的光電轉(zhuǎn)化效率一般為14%左右。本裝置中的太陽(yáng)能電池板的型號(hào)為NZ6161,6個(gè)太陽(yáng)能電池板串聯(lián)成一組,然后兩組并聯(lián),使太陽(yáng)能電池陣列輸出電壓達(dá)到2V*6=12V,輸出電流約為0.6A。與此相配備的蓄電池的氫鎳電池,型號(hào)為QNFZ10,其主要技術(shù)指標(biāo):額定容量為10Ah,標(biāo)稱電壓為1.2V,如果將10個(gè)蓄電池串聯(lián)成一組,然后兩組并聯(lián),輸出電壓將達(dá)到1.2V*10=12V。
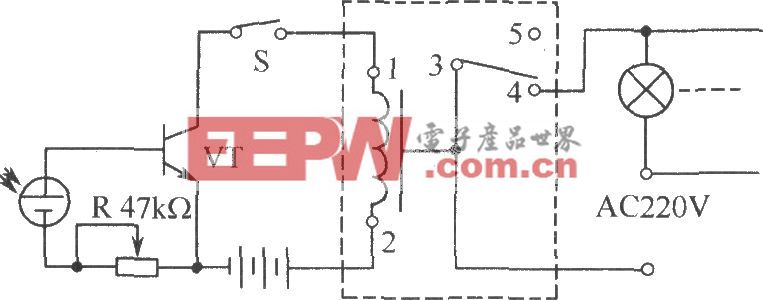
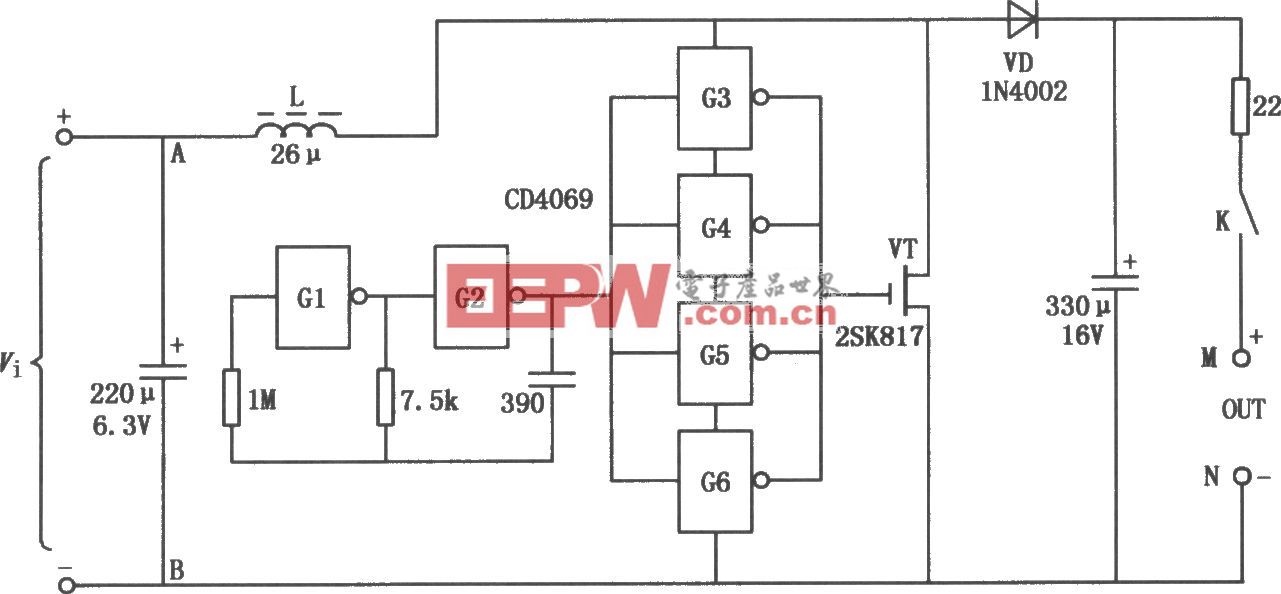
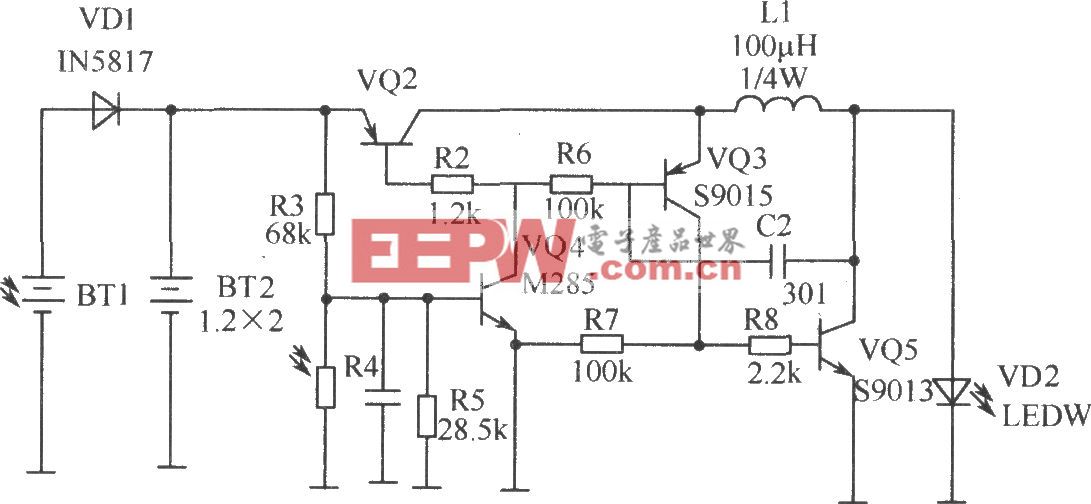
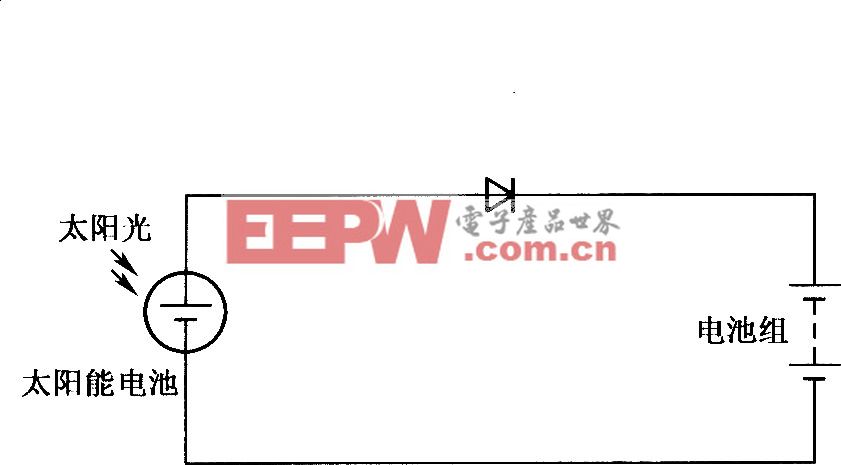
蓄電池充放電控制。為了保證蓄電池的正常工作,系統(tǒng)必須有自動(dòng)控制和保護(hù)功能。當(dāng)有足夠的太陽(yáng)光照射時(shí),多余的能量就給蓄電池充電;當(dāng)太陽(yáng)能電池功率不足時(shí),由蓄電池給小車供電;系統(tǒng)對(duì)蓄電池的過(guò)充、過(guò)放等狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)控,蓄電池放過(guò)充的電路原理如圖3所示。
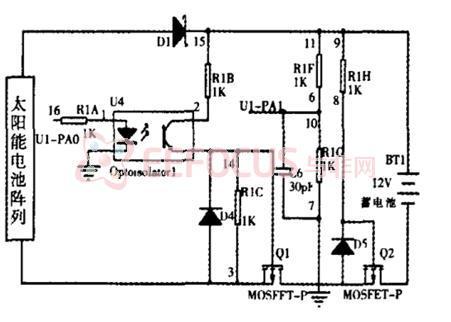
圖3 太陽(yáng)能充放電控制電路
U1-PA1端測(cè)得蓄電池充電的電壓值,通過(guò)A/D采樣后與門限電壓值相比較,若超過(guò)設(shè)定值時(shí),單片機(jī)U1-PA0輸出高電平,Q1 MOSFET導(dǎo)通,將蓄電池切離充電回路,并熄滅充電指示燈。當(dāng)U1-PA1端測(cè)得蓄電池的電壓值低于設(shè)定值時(shí),切斷輸出回路,以避免蓄電池電量過(guò)放。
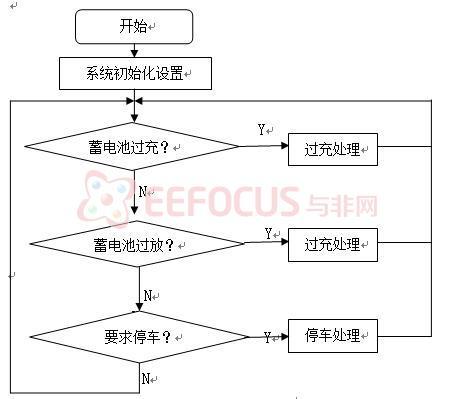
圖4 蓄電池充放電模塊軟件設(shè)計(jì)框圖
II 驅(qū)動(dòng)電路模塊
組成:L298驅(qū)動(dòng)芯片,四個(gè)電機(jī),單片機(jī)
控制系統(tǒng)主要由L298驅(qū)動(dòng)芯片和7404組成。采用后輪驅(qū)動(dòng),前面的左右兩輪控制方向的模式。前面的左右兩輪采用同種差勁運(yùn)動(dòng)結(jié)構(gòu)的小車,依靠輪子的速度差進(jìn)行轉(zhuǎn)向,當(dāng)兩邊輪子的速度相同時(shí)向前運(yùn)行,速度不同時(shí)進(jìn)行轉(zhuǎn)彎,左輪速度比右輪速度快時(shí)向右轉(zhuǎn)彎,右輪速度比左輪速度快時(shí)向左轉(zhuǎn)彎,同時(shí)選用小車時(shí)要注意小車的速度,不能選擇速度過(guò)快的小車,因?yàn)樾≤囆旭傔^(guò)快,不易控制它的轉(zhuǎn)彎。驅(qū)動(dòng)電路如圖5所示。
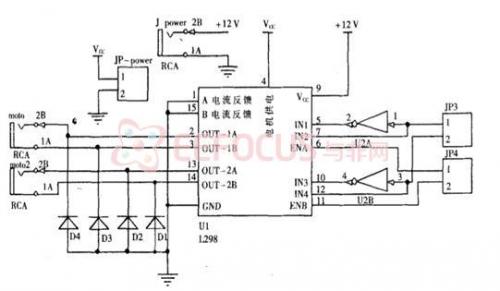
圖5 驅(qū)動(dòng)電路控制模塊
III 引導(dǎo)線檢測(cè)模塊
組成:反射式紅外發(fā)射-接收器
這里的引導(dǎo)線檢測(cè)是指小車可以在白色地板上沿著黑線行走。反射式紅外發(fā)射-接收器對(duì)黑白比較敏感,靈敏度高,且電路簡(jiǎn)單,完全滿足系統(tǒng)要求。
反射式紅外發(fā)射-接收器檢測(cè)到信號(hào)后與比較器LM324 的參考電壓相比較,當(dāng)檢測(cè)不到黑線時(shí),發(fā)射管發(fā)出的光經(jīng)面板反射后被接收管接收,接收管導(dǎo)通,LM324同向電壓低(≈0V);當(dāng)檢測(cè)到黑線時(shí),發(fā)射管發(fā)出的紅外光將不被接收管接收,接收管截止,LM324同向電壓高(=Vcc)。
由于小車不可能始終保持在一個(gè)方向上,必然會(huì)偏離黑色軌道,為了使小車在偏離軌道后,能調(diào)整方向,重新回到軌道上,系統(tǒng)需要將路面的狀態(tài)及時(shí)的以電信號(hào)的形式反饋到控制部分,控制部分控制前輪驅(qū)動(dòng)電機(jī),使小車重新回到軌道上來(lái)。
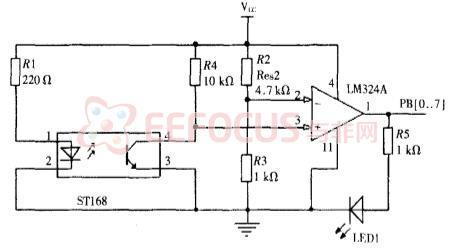
圖6 引導(dǎo)線檢測(cè)電路
如圖6所示,R1,R4起限流電阻的作用,紅外發(fā)射二極管發(fā)出光線,當(dāng)反射物體為白色時(shí),光反射到紅外接收的三極管,三極管的發(fā)射極和集電極導(dǎo)通,此時(shí)運(yùn)算放大器的同向輸入端輸入為低電平,放大器的輸出端輸出為低電平,當(dāng)反射物體為黑色時(shí),光反射到紅外接收的三極管,三極管的發(fā)射極和集電極截止,此時(shí)運(yùn)算放大器的同向輸入端為高電平,放大器的輸出端輸出為高電平,通過(guò)調(diào)節(jié)R2可以調(diào)整檢測(cè)的靈敏度。
表1 巡線電路輸出真值表
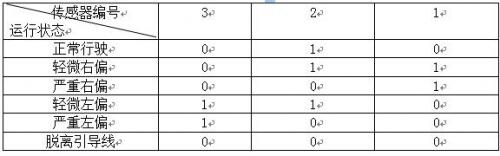
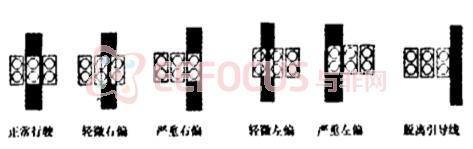
圖7 運(yùn)行狀態(tài)指示圖
從巡線電路輸出真值表中可以看出,當(dāng)小車行駛狀態(tài)不一樣時(shí),三個(gè)傳感器輸出值也對(duì)應(yīng)不同,單片機(jī)結(jié)合各傳感器送入的值,作出不一樣的反應(yīng),如輕微右偏時(shí)單片機(jī)控制小車向左轉(zhuǎn)彎,從而使小車回到正常的路徑上。
當(dāng)小車檢測(cè)到的信號(hào)為000時(shí),可能發(fā)生了兩種情況:
第一,小車已經(jīng)嚴(yán)重的偏離了正常的運(yùn)行軌道;第二,引導(dǎo)線有暫時(shí)的中斷。對(duì)于第一種情況應(yīng)該立即停車,而對(duì)于第二種情況應(yīng)該進(jìn)行判斷。判斷的方法是,讓小車?yán)^續(xù)前行,如果繼續(xù)行駛了2-3秒仍然未檢測(cè)到信號(hào)則判定為偏離軌道;如果檢測(cè)到了引導(dǎo)線信號(hào),則可繼續(xù)前行。
IV 碼盤(pán)測(cè)速模塊:
儀器:紅外光電碼盤(pán)
安裝在車后輪上,用來(lái)測(cè)定小車速度,如有必要可通過(guò)無(wú)線通信系統(tǒng)傳遞給上位機(jī),進(jìn)行分析和處理。
圖8 紅外光電碼盤(pán)
V 紅外遙控模塊
組成:遙控器,紅外線接收器
信號(hào)接收裝置主要有二極管、TSOP34836芯片及相應(yīng)的電路構(gòu)成。電路圖如圖9所示:
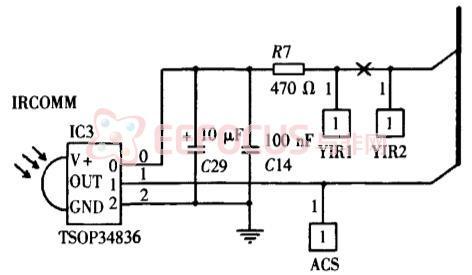
圖9紅外信號(hào)接收電路
軟件設(shè)計(jì):
紅外線遙控器通過(guò)RC5代碼傳輸數(shù)據(jù),而RC5數(shù)據(jù)包包含了設(shè)備地址、鍵盤(pán)編碼器和一個(gè)觸發(fā)器。5位的設(shè)備地址告訴哪個(gè)設(shè)備被遙控器控制。而對(duì)于本文的使用,設(shè)備地址也可以用來(lái)滿足一些單獨(dú)設(shè)備的使用。6位的編碼器附和按鍵遙控允許傳輸其他的數(shù)據(jù),但對(duì)于每個(gè)傳輸僅僅提供6位編碼器附和按鍵遙控。
在AVR—GCC環(huán)境下。RC5數(shù)據(jù)包可以通過(guò)使用void IRCOMM—sendRC5(unit8_t adr,unit8_t data)函數(shù)傳輸。其中,adr相當(dāng)于設(shè)備地址;data相當(dāng)于鍵盤(pán)編碼器。參數(shù)adr允許在重要的位(MSB)通過(guò)申請(qǐng)常量TOGGLEBIT來(lái)設(shè)置觸發(fā)位,方式如下:IRCOMM sendRC5 (12lTOG.GLEBIT,40);這個(gè)指令將通過(guò)地址12傳輸一個(gè)RC5數(shù)據(jù)包給設(shè)備,激活觸發(fā)位并且以40作為數(shù)據(jù)值,如IRCOMM—sendRC5(12,40)。
事件處理程序可以管理RC5的數(shù)據(jù)接收,只要RC5數(shù)據(jù)包接收,事件處理程序?qū)⒆詣?dòng)地被task ACS0函數(shù)調(diào)用。例如寫(xiě)一個(gè)程序,程序的要求是如果機(jī)器人接收到鍵盤(pán)編碼4號(hào)鍵,小車會(huì)向左轉(zhuǎn);接收到鍵盤(pán)編碼6號(hào)鍵則向右轉(zhuǎn)。
對(duì)于事件處理程序規(guī)定必須相應(yīng)采用void receiveRC5Data(RC5data_t rc5data)形式,但也可以自由地命名函數(shù)。可以通過(guò)IRCOMM_setRC5DataReadyHandler(receiveRC5Data)函數(shù)允許記錄一個(gè)預(yù)定的事件處理程序。在這之后,專用的函數(shù)將被每個(gè)有效的RC5接收的代碼調(diào)用。值得一提的是:RC5data_t是專門的預(yù)定義的數(shù)據(jù)類型.包含RC5設(shè)備地址、觸發(fā)位和鍵盤(pán)編碼(分別有對(duì)應(yīng)的值)。可以通過(guò)標(biāo)識(shí)符rc5data.device、rc5data.toggle_bit、rc5data.key_codet21就像使用變量一樣地使用這些數(shù)據(jù)。程序流程圖如圖10所示:
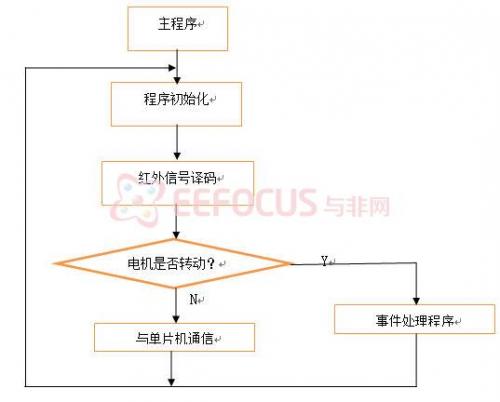
圖10紅外檢測(cè)電路軟件設(shè)計(jì)框圖
結(jié)束語(yǔ)
近年來(lái),太陽(yáng)能”綠色交通工具“被公認(rèn)為很有發(fā)展前途,并迅速發(fā)展,被廣泛應(yīng)用于家庭、休閑、公園等場(chǎng)所。本次設(shè)計(jì)的小車將集成化和智能化的理念較好地融入到控制系統(tǒng)設(shè)計(jì)中,所采用的AVR單片機(jī)其電路簡(jiǎn)單、故障率低、可靠性高,成本低廉,并且高速、低耗、保密。結(jié)合太陽(yáng)能與AVR單片機(jī)兩者的優(yōu)點(diǎn),實(shí)現(xiàn)了造價(jià)低廉,功能實(shí)用,節(jié)能節(jié)源的目的。本次設(shè)計(jì)的小車只是一個(gè)自動(dòng)運(yùn)輸電動(dòng)汽車的縮影,今后可推廣應(yīng)用于大功率太陽(yáng)能電瓶車或電動(dòng)汽車的控制場(chǎng)合,實(shí)現(xiàn)自動(dòng)運(yùn)輸功能。






評(píng)論