基于STM32控制的物品分揀搬送裝置

段麗娜 李若南 陳明 程清垚 李金龍 武昌首義學院(湖北 武漢 430064)
本文引用地址:http://www.104case.com/article/201703/345090.htm基金項目:2015年度湖北省教育廳科研計劃指導性項目“多傳感器數(shù)據(jù)融合技術在獨輪車避障中的應用”(編號:B2015196)
引言
在傳統(tǒng)的物料分揀系統(tǒng)中,一般使用紙制書面文件記錄物料數(shù)據(jù),在這樣的物料分揀系統(tǒng)中,大部分工作靠人力手工完成,嚴重影響物料的傳輸效率。隨著人們對物料的流動速度要求越來越高,這樣的物料分揀系統(tǒng)已遠遠不能滿足現(xiàn)代傳輸系統(tǒng)和物流管理的需要。傳統(tǒng)的自動分揀系統(tǒng),大多采用先定位,然后再用機械臂等大型設備進行分揀運輸,這樣的系統(tǒng)結構復雜,成本高昂,傳輸效率低,不能普及化。為了解決這一問題,我們建立一個電機橫向/縱向掃描的平臺來提高傳輸效率;采用先集中再處理的方式來提高分揀的精確度。該系統(tǒng)結構獨特新穎,成本低廉,傳輸效率快,分揀物品的準確性高。
1系統(tǒng)控制方案
1.1系統(tǒng)總體方案
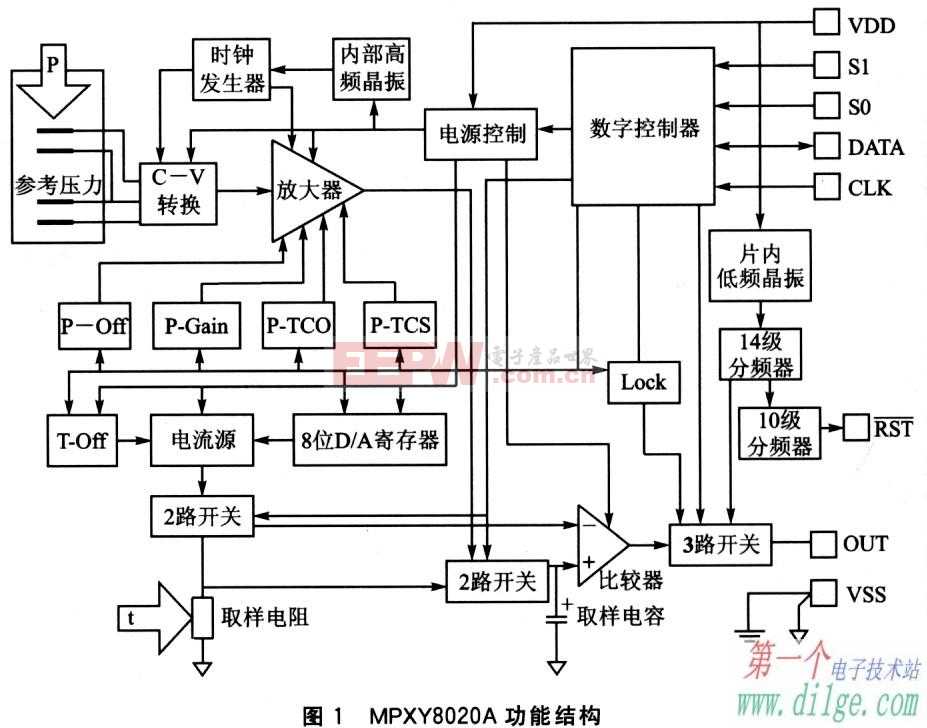
該物品分揀搬運系統(tǒng)可分為核心控制模塊、電源模塊、圖像識別模塊、顯示模塊、電機驅動模塊、聲光模塊等構成。其系統(tǒng)總體框圖如圖1所示:

圖1 系統(tǒng)總體框圖
整個系統(tǒng)采用電機橫向/縱向掃描平臺,在縱向軸上放置四個直流電機,其中一組電機實現(xiàn)縱向掃描,另一組實現(xiàn)左右運動的橫向掃描,完成物品分揀搬送。在二維基礎上再加裝攝像頭及舵機在固定的絲桿上面,通過帶編碼器的直流電機控制攝像頭和舵機在絲桿上移動,進而進行物品分揀搬送。
本系統(tǒng)采用TI公司的MSP430控制聲光模塊作為物品分揀裝置的聲光報警系統(tǒng)。一塊STM32-f1(1)系列的單片機控制觸控界面。另一塊STM32-f1(2)系列的單片機作為主控制,主要是進行以下幾個工作:一是對來自傳感器的信號進行判斷,進而驅動系統(tǒng)四個角的直流電機對橫向/縱向掃描平臺進行定位;二是對來自觸控界面的信號作出判斷,進而切換不同的運行模式;三是接收圖像處理的信號,驅動電機橫向/縱向掃描平臺;其中物品的檢測部分采用的是先集中在處理的方法:首先通過橫向/縱向掃描平臺將物品篩到一條直線上,并運送的物品檢測區(qū)域,該檢測區(qū)域的上方是一個固定的絲桿,絲桿上固定有攝像頭和舵機及舵機滑桿,樹莓派控制攝像頭在規(guī)定的檢測區(qū)域內(nèi)對物品進行檢測,將檢測到的物品信息通過通信的方式傳送給k60,k60根據(jù)信息來控制舵機和和電機的運動,進而實現(xiàn)對物品的篩分,物品檢測完后,k60用通信的方式發(fā)信號給主控機(stm32-f1(2)),主控機控制橫向/縱向掃描平臺將篩分后物品搬運到指定區(qū)域。
1.2 系統(tǒng)硬件結構
硬件電路主要有電源模塊,聲光報警模塊,傳感器模塊,光耦隔離模塊,和驅動模塊這幾部分組成。下面主要介紹幾個重要硬件電路。
系統(tǒng)的驅動模塊采用雙BTN7971大電流(70A)H橋驅動;與單片機完全光耦隔離,有效保護單片機;板子上有5v電源指示;電機驅動輸出端電壓指示;電源支持7.2-25V;驅動電路圖如圖2所示。

圖2驅動電路圖
在物品運送過程中,物品搬送速度是由測速傳感器進行檢測,其電路圖如下圖3所示:

圖3測速傳感器電路圖
在物品分揀過程中定位采用紅外對管,為了保護電路采用了光耦隔離器,其電路如下圖4所示:

圖4 光電隔離器
1.3 系統(tǒng)軟件設計
整個系統(tǒng)在坐標內(nèi)直接由二維結構控制電機運動,使物品搬送到指定位置,聲光報警后電機復位;整個系統(tǒng)通過TFT觸屏選擇模式實現(xiàn)不同的電機運動形式,X、Y軸上一個電機實現(xiàn)縱向掃描,另一個實現(xiàn)左右運動的橫向掃描,完成物品分揀搬送。在該區(qū)域內(nèi)通過USB攝像頭識別物品,將其中黑色物品掃向一側,桔色物品掃向另一側,并將不同顏色的物品搬送到各自指定位置。系統(tǒng)軟件設計流程如下圖5所示:

圖5 軟件設計流程圖
2系統(tǒng)的調(diào)試
系統(tǒng)硬件的結構搭建完成后,基本就解決了物品運送的問題,所以現(xiàn)在主要的難題是物品的分揀,為了更好的進行分揀,我們采用一種新型的方法--先集中再處理即通過電機橫向/縱向掃描平臺將物品篩成一條直線(該直線與絲桿平行)并運送到指定區(qū)域(攝像頭正下方)進行分揀。通過直流電機+編碼器裝置來控制絲桿轉動(即控制攝像頭在物品上方移動對物品進行識別),通過舵機+連片裝置來控制對識別的物品進行分揀。下面主要介紹主要裝置的控制算法及數(shù)據(jù)分析。
2.1直流電機及編碼器裝置
在系統(tǒng)中絲桿的轉動采用的是編碼器加直流電機,電機轉一圈,電機可以輸出550個脈沖,倍頻之后是2200。編碼器的額定工作電壓是5V,集成了上 拉電阻和比較整形功能,可以直接輸出方波。
根據(jù)編碼器反饋的AB兩相的方波信號,可以對其進行計數(shù),這樣就可以計
算出車輪電機的轉速。編碼器的脈沖信號是正方波,每一個周期內(nèi)都有一個上升沿和下降沿,這樣就可以設置單片機的定時器對其進行捕獲。單片機的定時器可以設置為正交解碼模式,當編碼器的兩路信號同時傳輸?shù)臅r候,可以分別識別其上升沿和下降沿,這樣其精度就可以乘以二。因為AB兩相信號的時間間隔剛好是四分之一周期,所以捕獲兩相信號的時候,可以實現(xiàn)倍頻的效果。
2.2圖像采集和處理
圖像的采集是通過在樹莓派上安裝中文字體和OpenCV的大型程序,搭建qt的開發(fā)環(huán)境,利用搭建好的開發(fā)環(huán)境實現(xiàn)對圖像的識別及處理,提取圖像的特征以及完成對圖像的基本變換,進而完成采集過程。
攝像頭獲取圖像信息的具體步驟如下:
(1)通過攝像頭讀取當前一幀的圖像;
(2)對圖像的大小進行調(diào)整(方便圖像像素點坐標與實際大小的換算);
(3)對圖像進行中值濾波消除噪聲點;
(4)對圖像進行灰度處理并二值化;
(5)提取像素點小于100的像素點進行反色處理;
(6)對圖像進行輪廓處理,并保存輪廓;
(7)對每個輪廓建立包圍矩形,通過左上角的坐標加上一定的比例參數(shù)確定中心坐標;
(8)當有黑色中心在圖像中心的范圍時輸出YES,否則輸出NO。
根據(jù)占空比,先利用分區(qū)差分法得出物品在某一區(qū),再結合算法得到物品在該區(qū)內(nèi)的偏移坐標,利用該區(qū)域在坐標軸的位置得出物品所在點的坐標。
表1 閾值與中心點坐標的關系

通過反復的測試,然后從測試閾值和中心點的關系表如表1所示可以看出當閾值設置為(10,255)時可以準確的讀出中心點的坐標。當然不同的光線,不同的位置對中心點坐標的位置有影響,所以需要具體的環(huán)境適當調(diào)整閾值。
2.3 樹莓派UART端口配置
圖像采集完后,需要將圖像信息傳送給從機(k60),從機驅動舵機進行分揀。其中圖像的信息傳輸是通過樹莓派UART端口進行傳輸,Linux對所有設備的訪問是通過設備文件來進行的,串口也是這樣,為了訪問串口,只需打開其設備文件即可操作串口設備。在Linux系統(tǒng)下面,每一個串口設備都有設備文件與其關聯(lián),設備文件位于系統(tǒng)的/dev目錄下面。如Linux下的/ttyS0,/ttyS1分別表示的是串口1和串口2。
通過樹莓派UART通信將攝像頭采集的圖像的信息發(fā)送給單片機k60,單片機k60根據(jù)過來的信號控制絲桿上的電機和舵機運動,實現(xiàn)物品的分揀。
2.4舵機及連片裝置
舵機的控制脈沖周期 20ms,脈寬從0.5ms-2.5ms,分別對應-90 度到+90 度的位置。
表2 舵機輸入脈沖與轉動角度的關系

表2是舵機算法上加入偏差二次項ABC后舵機響應時間的變化。通過表格可以看出,加入偏差二次項后,舵機的響應時間得到了提高,進而轉向性能得到了極大的提升。
數(shù)字舵機可以以很高的頻率進行調(diào)節(jié),這個周期和角度會變得非常小,并且有 PID 調(diào)節(jié)方式的存在,能夠在以很適當?shù)?nbsp;PID 參數(shù)進行調(diào)節(jié),能夠讓舵機有很高的響應速度,不會出現(xiàn)超調(diào)。
3 系統(tǒng)整體測試數(shù)據(jù)與結果分析
測試儀器:示波器,秒表,精度0.1cm卷尺,數(shù)字萬用表。
測試方法:選用圖5所示的測試模型場地,測試過程是將4cm的正方體物品置于A區(qū)域內(nèi)(距探測邊界≥5cm)任意一點,探測儀從探頭進入?yún)^(qū)進入進行檢測,在規(guī)定時限內(nèi)對正方體物品進行定位并完成搬送。

圖6 物品分揀系統(tǒng)測試場地模型圖
系統(tǒng)各項運動指標的測試結果如下表3所示:
表3 各測試項目的測量結果

搬送裝置實現(xiàn)物品在規(guī)定時間內(nèi)盡快達到目標區(qū)域,橫軸的右導軌向左方向運行,直到檢測到B區(qū)的右邊界時,停止右導軌的運動;縱軸的左導軌向下運動,直到檢測到B區(qū)的上邊界時,停止導軌的運動;通過GPIO發(fā)送完成信息,高電平,延時3秒,發(fā)送低電平;縱軸左導軌向上運動,檢測到左導軌起始點,停止導軌運行;橫軸右導軌向右運動,檢測到右導軌起始點,停止導軌運行。
由表3的數(shù)據(jù)可以得出,該系統(tǒng)能夠在一個 100cm×150cm的區(qū)域A內(nèi)用小于10s的時間把區(qū)域A內(nèi)的物品搬運到指定區(qū)域B或者C區(qū)域;并且能夠將散落在A區(qū)的不同物品分揀開,并以小于60s的時間內(nèi)分別搬運到B區(qū)域和C區(qū)域。
4 結論
本文設計的物品分揀裝置結構新穎,不同于傳統(tǒng)的定位分揀。該系統(tǒng)硬件結構上采用電機橫向/縱向掃描平臺來實現(xiàn)物品的搬運,簡單高效。物品的分揀采用先集中后處理的方法,先通過掃描平臺不停的篩動物品,從而使物品集中在一條直線上,然后通過掃描平臺運送的指定區(qū)域進行分揀處理。方案新穎獨到,采用這一方案獲得2016TI杯全國大學生電子設計大賽湖北省一等獎。同時該系統(tǒng)也為我們提供一種新的解決物品分揀效率低難題的方案。隨著競爭的加劇,人們對物料的流動速度要求越來越高,這樣的物料分揀系統(tǒng)現(xiàn)代傳輸系統(tǒng)和物流管理具有一定實用價值。








評論