基于CNC齒輪測(cè)量中心的齒條滾刀測(cè)量

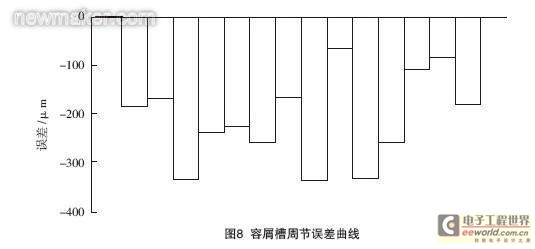
容屑槽的周節(jié)誤差是以容屑槽來(lái)標(biāo)注同一頭上的各齒來(lái)進(jìn)行誤差計(jì)算的。國(guó)家標(biāo)準(zhǔn)GB/T 6084—2001關(guān)于滾刀容屑槽周節(jié)誤差的規(guī)定:容屑槽相鄰周節(jié)差是在滾刀分度圓附近的同一圓周上,兩相鄰周節(jié)的最大差值。測(cè)量滾刀容屑槽周節(jié)誤差時(shí),需要將測(cè)頭手動(dòng)調(diào)整到1號(hào)齒的刀齒前方的齒槽內(nèi),該齒即為容屑槽周節(jié)誤差計(jì)算的基準(zhǔn)齒,將X軸的坐標(biāo)值控制在滾刀分度圓半徑處,Y軸的坐標(biāo)值控制為0,Z軸坐標(biāo)值保持不變,主軸旋轉(zhuǎn)連續(xù)掃描Zk個(gè)容屑槽周節(jié),其實(shí)測(cè)誤差曲線如圖8 所示。
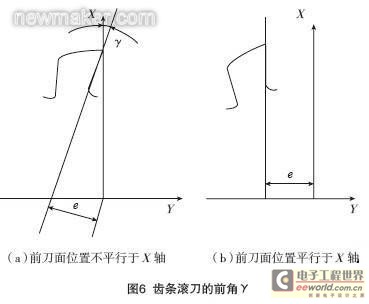
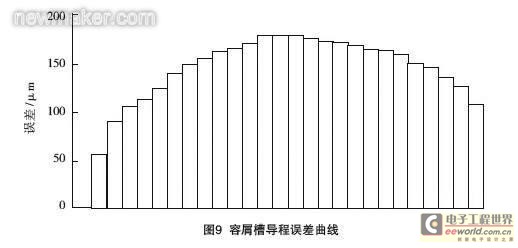
容屑槽的導(dǎo)程誤差可分為滾刀容屑槽為直槽的刀齒前面與內(nèi)孔軸線的平行度和螺旋槽的導(dǎo)程誤差,國(guó)家標(biāo)準(zhǔn)GB/T6084—2001關(guān)于滾刀直槽的刀齒前面與內(nèi)孔軸線的平行度的規(guī)定:直槽的刀齒前面與內(nèi)孔軸線的平行度是在靠近分度圓處的測(cè)量范圍內(nèi),容納實(shí)際前面的2 個(gè)平行于理論前面的平面間的距離;螺旋槽的導(dǎo)程誤差是在靠近分度圓處的測(cè)量范圍內(nèi),容屑槽前面與理論螺旋面的偏差。齒條滾刀由于其螺旋升角為0,測(cè)量容屑槽的導(dǎo)程誤差時(shí),將X 軸的坐標(biāo)值控制在滾刀的分度圓半徑處,Y軸坐標(biāo)值控制為0,若容屑槽為直槽則其主軸保持靜止不動(dòng),只需控制Z 軸的上升運(yùn)動(dòng)即可,如容屑槽為螺旋槽則需控制主軸的旋轉(zhuǎn)和Z 軸的上升運(yùn)動(dòng)。其實(shí)測(cè)誤差曲線如圖9所示。
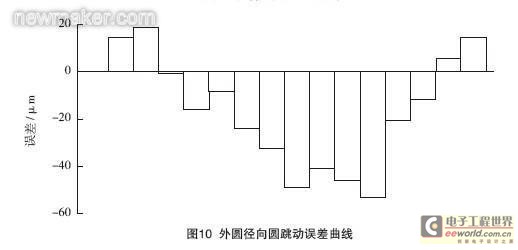
外圓的徑向圓跳動(dòng)誤差反映的是滾刀徑向的綜合偏差,國(guó)家標(biāo)準(zhǔn)GB/T6084—2001關(guān)于滾刀外圓的徑向圓跳動(dòng)誤差的規(guī)定:滾刀全長(zhǎng)上,齒廓到內(nèi)孔中心線距離的最大差值。測(cè)量齒條滾刀外圓的徑向圓跳動(dòng)時(shí),自動(dòng)將X 軸坐標(biāo)運(yùn)動(dòng)到0,Y軸坐標(biāo)運(yùn)動(dòng)到齒頂外側(cè)附近進(jìn)行頂刃的搜索,搜索到的頂刃所在齒為起測(cè)齒,控制測(cè)頭能夠有效壓到頂刃刃口上, X軸和Y軸的坐標(biāo)值保持不變,由于齒條滾刀的螺旋升角為0,則其 Z軸坐標(biāo)保持不變,只需控制主軸旋轉(zhuǎn)掃描即可。其實(shí)測(cè)誤差曲線如圖10所示。
基于坐標(biāo)測(cè)量原理的CNC齒輪測(cè)量中心能快速、準(zhǔn)確、自動(dòng)地測(cè)量齒條滾刀的螺旋線誤差、齒形誤差、刀齒前面徑向性、容屑槽周節(jié)誤差、容屑槽導(dǎo)程誤差、外圓徑向跳動(dòng)誤差等項(xiàng)目,具有測(cè)量誤差項(xiàng)豐富、操作簡(jiǎn)單、測(cè)量效率高等顯著優(yōu)點(diǎn)。

評(píng)論