基于Arduino與LabVIEW的直流電機轉(zhuǎn)速控制系統(tǒng)

直流電機是Arduino機器人制作中的主要動力來源,但是由于電機的參數(shù)一致性有所差別,即使是相同型號的電機在相同電壓下的轉(zhuǎn)速都不完全相同,而且在帶負載或負載不同的情況下,更加會導(dǎo)致電機轉(zhuǎn)速發(fā)生變化,這就會導(dǎo)致制作的Arduino輪式機器人不能實現(xiàn)直線行走,因為這是一個開環(huán)控制,沒有任何反饋信號返回。如果給直流電機加上編碼器作為反饋器件,也就可以測量得到電機的當前轉(zhuǎn)速,如果將其與設(shè)定值計算差值,并通過PID算法計算得到新的控制信號,從而可以動態(tài)的測量和控制電機的轉(zhuǎn)速,形成一個閉環(huán)控制系統(tǒng)。
本文引用地址:http://www.104case.com/article/201701/337030.htm下面我們利用帶有編碼器的直流電機、Arduino控制器、直流電機驅(qū)動板和LabVIEW上位機軟件以實驗探索的形式來設(shè)計一個直流電機轉(zhuǎn)速比例控制實驗。
1.TimerOne定時器庫
1.1下載及使用方法
TimerOne定時器庫使用AVR單片機內(nèi)部的定時器1實現(xiàn)定時中斷的功能,其下載地址為:https://code.google.com/p/arduino-timerone/,只需要更改幾個參數(shù)即可使用定時器中斷來實現(xiàn)周期性執(zhí)行的任務(wù)。需要注意的是,如果使用了TimerOne定時器庫,也就不能在相應(yīng)的引腳輸出PWM電壓,Uno上的定時器與PWM引腳的關(guān)系如表1所示。
表1定時器與PWM引腳的關(guān)系
定時器 | OC0A | OC0B | OC1A | OC1B | OC2A | OC2B |
PWM引腳 | 6 | 5 | 9 | 10 | 11 | 3 |
TimerOne定時器庫函數(shù)庫中自帶的ISRBlink程序如程序代碼1所示,可以實現(xiàn)13號管腳上LED的5Hz頻率的閃爍。
程序代碼1:ISRBlink示例程序
#include
void setup() {
}
void loop(){
//主函數(shù),用于執(zhí)行非周期性任務(wù)
}
void timerIsr(){
}
1.2評估定時時間的準確性
僅僅憑靠眼睛不能判斷定時時間是否準確,下面我們設(shè)計一個實驗來評估定時時間的準確性。我們需要將上面示例代碼中的Timer1.initialize(100000)更改為Timer1.initialize(1000),digitalWrite( 13, digitalRead( 13 ) ^ 1 )更改為digitalWrite(2, digitalRead( 2) ^ 1 ),通過反轉(zhuǎn)I/O的電平實現(xiàn)數(shù)字端口2輸出500Hz的近似方波。
同時,我們使用NI USB-6009便攜式數(shù)據(jù)采集卡和LabVIEW 2012軟件實現(xiàn)一個簡易的模擬量采集器,將Arduino控制器上的數(shù)字端口2和GND分別與NI USB-6009便攜式數(shù)據(jù)采集卡上的AI0/AI0+和AI4/AI0-相連接,NI USB-6009便攜式數(shù)據(jù)采集卡接口示意圖如圖1所示,Arduino Uno控制器與USB-6009便攜式數(shù)據(jù)采集卡的連接圖如圖2所示。然后使用10kps的采樣率,5秒的采樣時間的參數(shù)采集Arduino控制器上的數(shù)字端口2輸出的方波信號,取其前20ms的波形如圖3所示,通過波形頻率分析工具測量得到其頻率為499.901Hz。
另外,我們又將定時時間設(shè)置為100微秒、50微秒和25微秒,并使用NI USB-6009便攜式數(shù)據(jù)采集卡和LabVIEW 2012軟件以45kps的采樣率和2秒的采樣時間分別采集了數(shù)字端口2輸出的波形數(shù)據(jù)并進行頻率分析,得到其頻率分別為4999.01Hz,9998.03Hz,19996Hz。從以上數(shù)據(jù)對比分析可知,定時器的定時時間非常準確,頻率測量誤差主要來自于I/O反轉(zhuǎn)操作延時導(dǎo)致的。
最后,我們還測試了OCROBOT MEGA 2560控制器、Arduino Uno控制器山寨版輸出的500Hz的方波信號頻率,分別為500.435Hz和499.764Hz。
圖1 NI USB-6009接口示意圖

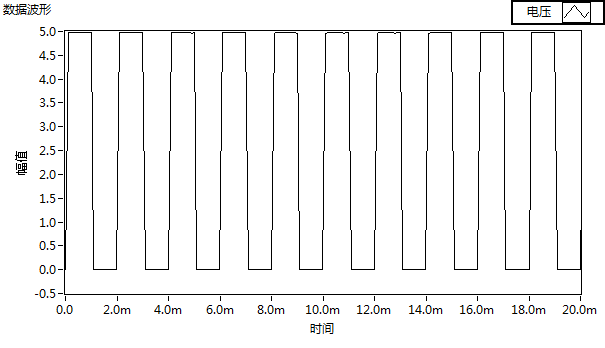
圖3定時器中斷產(chǎn)生的500Hz方波信號
2.轉(zhuǎn)速測量
2.1測量轉(zhuǎn)速方法
測量轉(zhuǎn)速方法有3種,分別為測頻法(M法)、測周法(T法)及混合法(M/T法)。
測頻法是在一定時間內(nèi),通過測量旋轉(zhuǎn)引起的單位時間內(nèi)的脈沖數(shù),實現(xiàn)對旋轉(zhuǎn)軸轉(zhuǎn)速測量的一種方法,適用于高、中轉(zhuǎn)速的測量。該法本質(zhì)上屬于定時測角法,為提高測量的準確度,有時采用多標記或開齒的方法,其不確定度主要取決于時間測量和計數(shù)量化。
測周法是在轉(zhuǎn)速脈沖的間隔內(nèi),用時鐘脈沖來測量轉(zhuǎn)速的一種方法,適合于低轉(zhuǎn)速測量。該法實際上就是定角測量法,即用時標填充的方法來測量相當于某一旋轉(zhuǎn)角度的時間間隔。在高、中轉(zhuǎn)速時,可采用多周期平均來提高測量準確度,其不確定度主要取決于時間測量、計數(shù)量化及觸發(fā)的不確定度。
混合法是在測頻法的基礎(chǔ)上,吸取測周法的優(yōu)點匯集而成的一種轉(zhuǎn)速測量方法。它是在轉(zhuǎn)速傳感器輸出脈沖啟動定時脈沖的同時,計取傳感器輸出脈沖個數(shù)和時鐘脈沖個數(shù),而當?shù)竭_測量時間時,先停止對傳感器輸出脈沖的計數(shù),在下一個定時脈沖啟動之前再停止時鐘脈沖的計數(shù)。因此,該種方法可在較寬的范圍內(nèi)使用。
此處,我們選擇測頻法來測量轉(zhuǎn)速,其工作原理為:當被測信號在特定時間段T內(nèi)的周期個數(shù)為N時,則被測信號的頻率f=N/T。
2.2轉(zhuǎn)速測量程序設(shè)計
利用TimerOne定時器庫來實現(xiàn)定時,通過外部中斷對電機編碼器輸出的脈沖進行計數(shù),計數(shù)值除以定時時間即為一定時間內(nèi)的轉(zhuǎn)速。實現(xiàn)1秒內(nèi)轉(zhuǎn)速測量的程序如程序代碼2所示。
程序代碼2:轉(zhuǎn)速測量程序
#include
long counter_val[2] = {0,0};
byte CurCnt = 0;
int j=0;
void setup() {
}
void loop()
{
}
//外部中斷處理函數(shù)
void counter()
{
}
//定時器中斷處理函數(shù)
void timerIsr()
{
}
2.3驗證頻率測量的準確性
前面提到了Arduino的模擬輸出(PWM)的頻率約為490Hz,且轉(zhuǎn)速測量采用的是測頻法,此時用來正好來驗證一下程序設(shè)計的正確性。在上面的轉(zhuǎn)速測量程序中的void setup()里面delay(2000)之前增加如下代碼,以產(chǎn)生方波。串口輸出的頻率測量結(jié)果如圖4所示。

評論