清潔機器人之吸塵機器人控制系統的設計

接近傳感器用來探測地面是否有懸崖,在機器人底部的正前、左前、右前和后方各布置1個。除了上述三種傳感器以外,在三個輪子上都裝有一個常開的開關傳感器,當輪子懸空的時候,開關就會閉合,輸出低電平。當輪子懸空時可以讓機器人停止運轉。
2電機控制系統
在小功率系統中,直流電機線性特性良好,控制性能優越,適合于點位和速度控制。為了實現直流電機的正反轉運行,只需要改變電機電源電壓的極性。電壓極性的變化和運行時間的長短可以由處理器實現,而提供直流電機正常運行的電流則需要驅動電路。
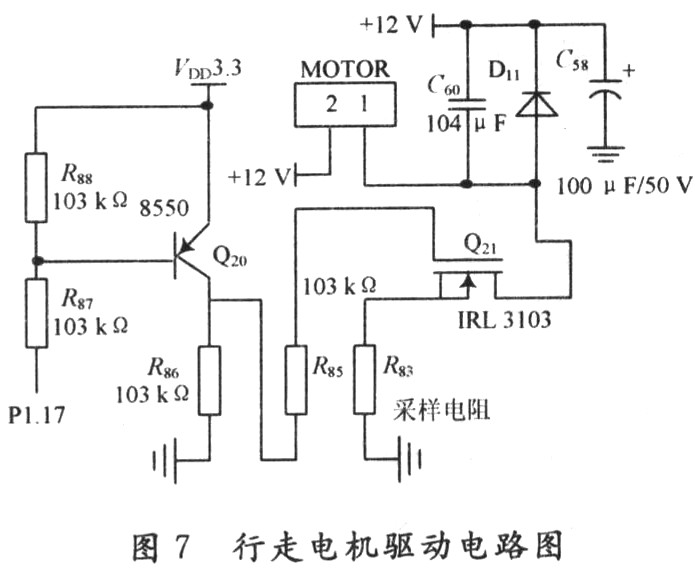
H橋式驅動電路是比較常用的驅動電路。該設計兩個行走驅動電機采用分立器件功率場效應管和續流二極管搭建,成本低,便于散熱,如圖6所示。
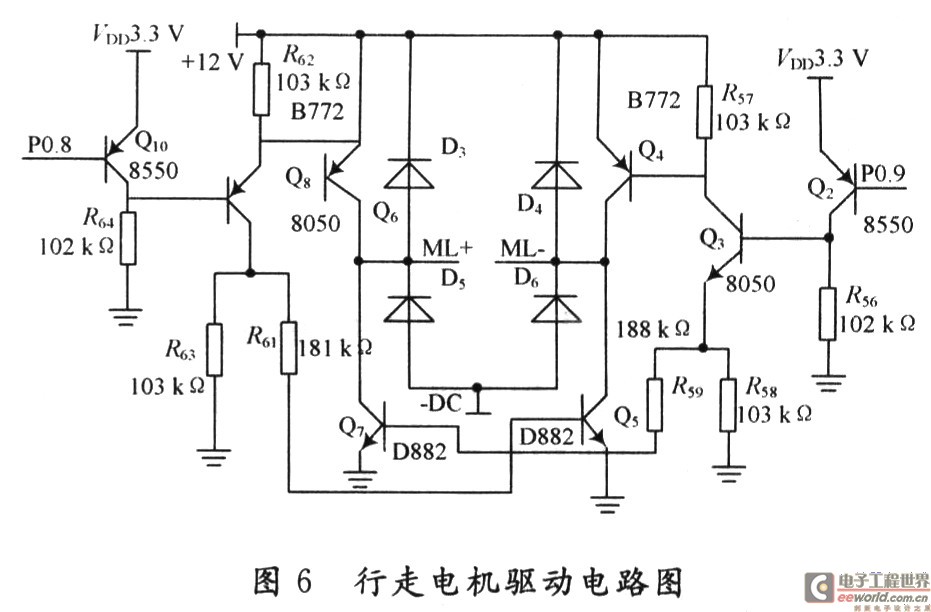
用ARM7的P0.8和P0.9來控制電機,這兩個管腳都是PWM輸出管腳,可以控制電機的速度。該部分主要保證機器人能夠在平面內移動,同時輪上帶有編碼器,可以對行走的路程進行檢測。通過航位推算可以實現機器人的轉彎,假設機器人光電碼盤的分度數為N;控制器收到的脈沖數為m;輪子的直徑為D;兩個輪子之間的間距為W,則輪子前進的距離為:
![]()
設機器人在環境坐標系中的位姿為(X(t),Y(t),φ(t)),則第n+1次采樣的方位角φn+1值和第n次采樣的φ值有以下關系:
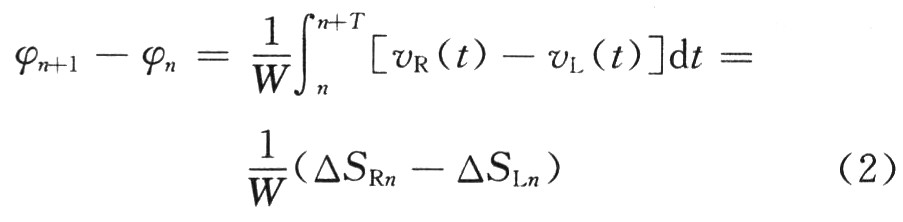
式中:vR(t)和vL(t)分別是在t時刻兩輪的速度;△SLn和△SRn為兩個主動輪從第n次采樣時刻到第n+1次采樣時刻之間所行走的距離。

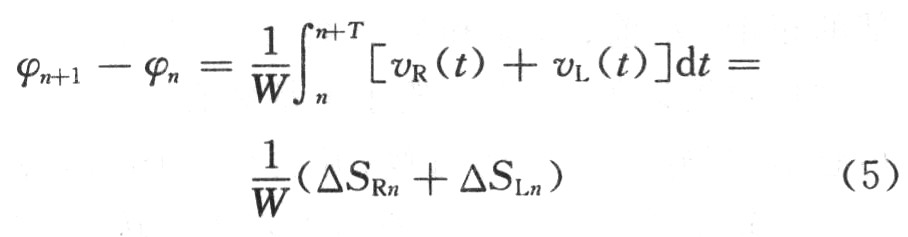
如果規定要進行原地轉彎,就是一個輪子正轉,另外一個輪子反轉的方式那么:
3結語
清潔機器人作為服務機器人的一種,有著巨大的市場潛力和廣闊的應用前景。隨著傳感技術的發展和微處理器的不斷進步,價格也在不斷下降。在此研究和設計一個基于ARM7微處理器的清潔機器人控制系統,不僅滿足了實用性的要求,而且在不增加成本的基礎上為軟件提供了良好的硬件支持,為更好的算法和軟件升級提供良好的技術支持。

評論