黑匣子攝像頭實現車道偏離報警功能①

富士通研究所用提供給汽車黑匣子的廣角攝像頭進行車道偏離報警的技術。原來的車道偏離警報功能需要使用可顯示遠方白線的、視角為30度左右的專用攝像頭,如果使用只能顯示近處部分白線的、視角為130度左右的汽車黑匣子用攝像頭,就無法準確檢測車道線。富士通研開發出了根據廣角攝像頭拍攝的多張圖片來推斷車道線形狀的技術,因此可在不使用專用攝像頭的情況下,在汽車黑匣子中追加車道偏離警告功能。
原來想要利用廣角攝像頭的圖像來實現車道偏離警報功能時,容易發生車道線識別錯誤。比如在車道線為虛線且道路轉彎時,以及為了促使車輛減速在實際車道線內側鋪設短虛線的輔助線時。富士通研開發了可識別這兩種圖案的車道線形狀的推斷技術。
遇到虛線彎路時也可實時識別
在車道線為虛線且道路轉彎時,窄角攝像頭可沿著道路觀測多條白線虛線,而廣角攝像頭只能顯示遠方的區域,因此只能觀測左右一對的虛線。由于虛線長度只有8m左右,因此這樣無法判斷出彎路的彎曲,在原來的方式中使用廣角攝像頭時,就會將彎路誤認為直路,對車輛與白線間的距離做出誤判。
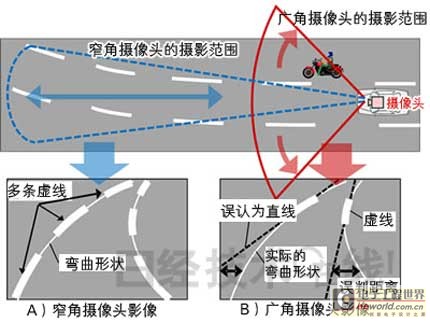
在虛線彎路上推斷車道線形狀的以往方法 (圖片由富士通研究所提供)
對此,富士通研著眼于短時間內道路線形狀變化少這一點,將每100ms的時間序列的多張圖像中的虛線連接起來,由此來復原車道線。由于隨著自車的移動,白線位置會逐張圖像地偏移,因此按照橫移(等速移動)和轉彎(等速轉彎)將車輛的移動制成了模型。然后根據時間序列的白線圖像,使用車輛移動的模型來制作對移動的影響實施修正的路面合成圖像。也就是說,通過合成圖像的白線來推斷車道線的形狀。

對車輛移動造成的偏移實施修正 (圖片由富士通研究所提供)
另外,為了確保實時性,還開發了新的計算方法,彎曲曲率使用最近的車輛前方的多張圖像以上述方法來計算,而剩余的車道線形狀(道路寬度及車輛朝向等)則通過當前時刻的單張圖像來計算。彎曲曲率在短時間內變化較少,因此根據時間近的過去的圖像來計算,車道線形狀的推斷精度也幾乎不會下降。

評論