基于AD2S83的角位置檢測系統及其在電動助力轉向系統中的應用

 |
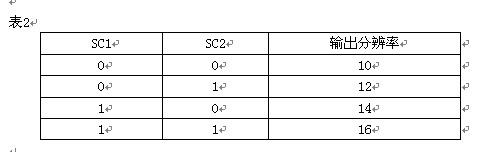
AD2S83的輸出分辨率可以通過SC1,SC2 兩個管腳的邏輯狀態被用戶設置為lO,12,14,16位,具體見表2
 |
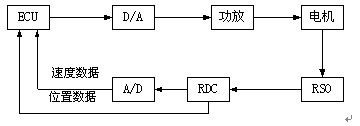
電動助力轉向系統必須滿足很高的實時性和較高的精度要求,同時要確保其具有高的可靠性。基于無刷旋轉變壓器與AD2S83集成電路的優點,選用高可靠性的無刷旋轉變壓器與AD2S83構成這EPS系統角位置檢測系統,并以AD2S83的模擬速度輸出信號作為速度反饋信號構成EPS系統的速度回路是設計這些EPS系統時較好的選擇。系統框圖見圖2。
5.1位置檢測單元硬件電路設計及實現
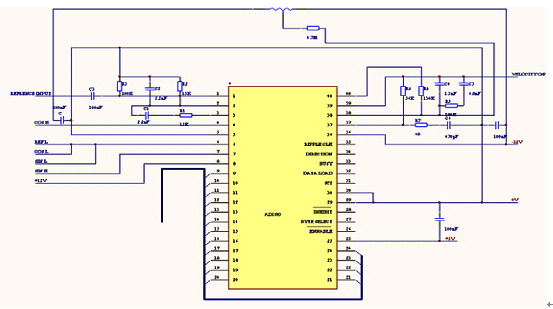
根據系統的性能指標,選擇分辨率為12bit,勵磁頻率為5KHz,最大跟蹤頻率為260rps,帶寬為520Hz。按照上述計算方法選定AD2S83的外圍元件后,即可設計出速度反饋與位置檢測電路。硬件連接圖如下:
 |
5.2 AD2S83與單片機的連接
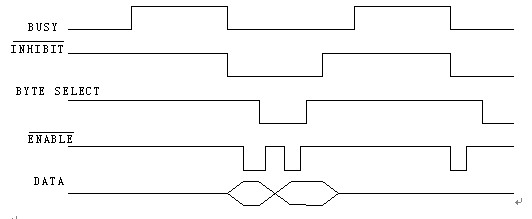
下面介紹單片機對AD2S83 RDC的操作,在此之前先對AD2S83變換器的控制信號加以簡單的說明:
BYTESELECT輸入:無論該信號的狀態如何當
速度信號:速度信號是由積分器輸出的與速度成正比的直流信號,在許多情況下可以使用該信號代替傳統的測速發動機。
5.3單片機對AD2S83讀取數據的過程:
首先對AD2S83施加
 |
本文介紹了AD2S83RDC集成電路的應用,并設計了由該集成電路和旋轉變壓器構成的EPS系統中位置檢測系統,并已成功的應用到市科委在汽車學院的EPS項目當中。經實踐表明,該系統具有誤差小、實時性好、可靠性高、抗干擾能力強等優點。

評論