基于AD2S83的角位置檢測系統及其在電動助力轉向系統中的應用

基于電磁感應原理的旋轉變壓器(Resolver),有時又稱為解算器,是一種精密控制電機,在電動助力轉向系統中,完成軸角位移信息的檢測功能。由于它是模擬機電元件,所以,當其用于數字系統中,就需要一定的接口電路,即旋轉變壓器-數字變換器(RDC),以實現模擬量信號到控制系統數字量的轉換。隨著電子技術的飛速發展,美國AD公司已將它發展成為一系列的單片集成電路,從而彌補了過去由分立元件搭成的RDC體積大、可靠性低的不足,給工程應用帶來了極大的方便。由旋轉變壓器和AD2S83就可以構成高精度的電動助力角位置檢測系統,而且AD2S83輸出的模擬速度信號還可以作為速度反饋信號以構成電動助力轉向系統中的速度回路。
2 旋轉變壓器
旋轉變壓器是按照電磁感應原理而工作的元件,其定、轉子上都有繞組,彼此同心安排,互相耦合聯系,旋轉變壓器采用正交的兩相繞組,它主要用于角度位置控制系統中,作為角度位置檢測元件。若旋轉變壓器的勵磁電壓為E=Esinwt,則正交的A、B兩相繞組中感應的電動勢為:
 |
3 AD2S83簡介
AD2S83是美國AD公司推出的以BiMOS II工藝制造的,將先進的CMOS邏輯電路與高精度雙極線性電路相結合的單片集成電路。它功耗低(300mW),其數字輸出分辨率可被用戶設置成10,12,14或16位,并具有速度輸出信號可供用戶作為速度回路的速度反饋信號使用,以取代測速發電機等測速元件,從而縮小了系統的體積。 AD2S83按圖1連接后,就構成一個工作于II型伺服環的跟蹤式RDC,其數字輸出能以選取的最大跟蹤速率自動跟蹤軸角輸入,沒有靜態誤差。由于它在把旋轉變壓器信號轉換為二進制時,采用比率式跟蹤方法,輸出的數字角僅與SIN和COS輸人信號的比值有關,而與它們的絕對值大小無關,因此,AD2S83對輸人信號的幅值和頻率變化不敏感,不必使用穩定、精確的振蕩器來產生參考信號,而仍能保證精確度。轉換環路中相敏檢測器的存在保證了對參考信號中的正交分量有很高的抑制能力。另外,它抑制噪聲、諧波的能力強。AD2S83突出的優點就在于它可由用戶選擇相應的參數來優化整個系統的性能。
圖1
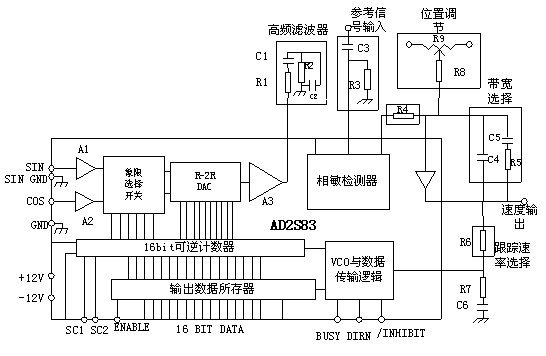 |
位置檢測電路設計的關鍵,就是要正確地選擇AD2S83的外圍元件。下面就介紹AD2S83外圍元件的選擇。應注意選用量接近理想值的元件,并工作于允許的溫度范圍內。選用誤差等級為5%的元件并不會降低轉換器的性能。參見圖1。
4.1 高頻濾波器元件R1、R2、C1、C2的選擇
高頻濾波器的作用是消除直流偏置和減少進入到AD2S83信號中的噪聲,因為它們影響相敏檢測器的輸出。在有來自開關電源和無刷電機的噪聲時,其作用尤其重要。元件參數
的選擇如下:
C1=C2=15k ≤R1=R2≤56k (3)
 (4)
(4) 其中, 為參考頻率
當取R2=R3,C1=C3時,只R1、C2可以省略。
注意:由于該高頻濾波器對輸入到相敏檢測器的信號有3倍的衰減,因此,它會影響環路的增益。
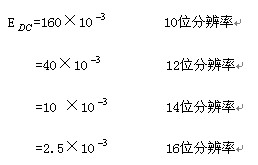
4.2 增益比例電阻R4的選擇
若C1,C2滿足(3)式和(4)式,則
 (5)
(5) 否則
 (6)
(6) 其中,100 10 電流/LSB;
4.3 R3、C3的選擇
合適的R3、C3使信號在參考頻率上沒有明顯的相位移,兩元件為:
 (7)
(7) 4.4 最大跟蹤速率的選擇
VCO的輸入電阻R6用來設置變換器的量大跟蹤速率。若在量大跟蹤速率時,速度輸出為8V,則R6為:
 (8)
(8) 其中,T不能超過最大跟蹤速率或參考信號頻率的l/16,N為輸出分辨率。
4.5 閉環帶寬的選擇
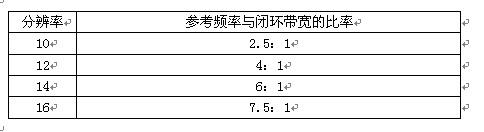
選擇閉環帶寬( )時,必須保證參考頻率與閉環帶寬的比率不超過表l所示的指標。
表1如下:
 |
 (9)
(9) 
4.6 VC0相位補償

4.7 偏置調整
積分器輸入端的漂移與偏置電流會引起變換器輸出端額外的位置漂移,如果能忽略漂移,則可省略R8,R9,否則應取R8=4.7M ,R9=1M (電位器)。為了減小零點漂移,首先選擇好AD2S83的外圍元件,并斷開AD2S83與旋轉變壓器的連接,然后連接COS與REFERENCE INPUT兩個引腳,SIN與SIGNAL GROUND兩個引腳,加上電源與參考信號后,調節電位器R9,使輸出為全“0”。
圖2

評論