CAN總線在商用車上數據采集的實現

控制器局域網(CAN,Controller Area Network)是一種支持分布式實時控制的串行通訊網絡系統,具有很高的安全性,主要應用于嵌入式控制器的通訊系統和智能裝置的開放式通訊系統,據統計,應用CAN總線后,整車線束連線可縮短200~1000 m,質量可減輕9-17kg,布線明顯簡化,可靠性和實時性顯著提高。
1 商用車控制系統及其拓撲結構
商用車控制系統的控制對象包括:底盤系統、車身系統、發動機。如圖1所示。
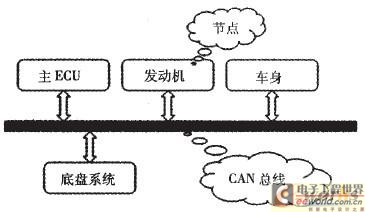
圖1 商用車控制系統拓撲結構
2 商用車CAN總線數據的采集硬件設計
2.1 車身節點的數據采集
商用車車身系統需要采集的信號有左右門集控鎖,電控車窗、雨刮器、前后車燈以及車內空調等。這些信號要求的實時性不是很高,可以采用B級網絡。
選取89C52單片機作為此節點的CPU,SJA1000作為CAN控制器,82C250作為CAN驅動器(或收發器)。如圖2所示。
商用車車身需要采集的信號較多,如果每個信號都設置一個CAN控制器和接口電路,造成成本和空間很大的浪費,可設置幾個四選一電路選取信號,如圖3所示,最終通過幾個四選一電路,選取一個信號,送給單片機進行信號采集,經過CAN控制器和接口電路,傳輸到CAN總線上。

圖2 車身節點硬件原理圖
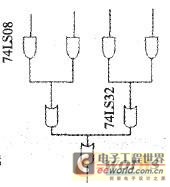
圖3 四選一電路
2.2 發動機節點數據采集
發動機節點需要采集的數據有發動機的轉速、車速、發動機的油量以及冷卻水的溫度,需要一個四選一電路。其中,溫度和油量信號需要差動放大和V/F轉換,轉化成頻率信號,如圖4所示,便于單片機進行采集,其采集電路和車身采集電路一樣。發動機轉速和車速信號需要經過整形,然后才能輸入單片機進行采集。其整形電路如圖5所示。
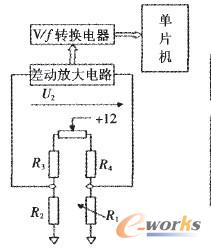
圖4 油量采集電路
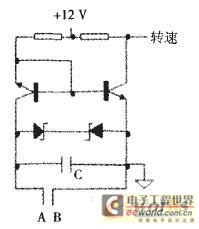
圖5 整形電路
2.3 底盤節點的數據采集
本系統中商用車底盤節點主要是針對懸架系統來說的,為了改善車輛的行使平順性和操縱穩定性,所采集的信號主要是電控空氣懸架系統的高度變化信號和空氣彈簧的壓力信號。空氣懸架的高度變化由高度傳感器來測量,壓力信號由壓力傳感器來測量。
壓力傳感器和高度傳感器都是電磁式的傳感器,將壓力的變化和高度的變化轉換成電勢信號輸出。為了系統統一,將此信號經過差動放大和V/f轉換,轉換成頻率信號,分時送給單片機進行采集。其采集電路和車身信號采集電路一樣,不再贅述。這樣,整個系統的信號采集電路做到統一。

評論