基于CAN總線遠程振動監測系統研究

引言
當前,遠程振動監測系統在理論研究和應用系統開發等方面已取得了一定進展,但在系統可靠性、網絡安全、遠程數據實時采集和傳輸、信息共享等方面還存在著許多不足。特別是處于惡劣和復雜環境下的大型設備,一方面分布地域廣,監測點多;另一方面空間位置有限,常常存在嚴重的電磁干擾。因此,采用既實時、靈活和高效,又安全可靠的現場總線數據通訊方式作為設備狀態監測系統的數據采集和傳輸方式十分必要。
CAN現場總線是一種有效支持分布式控制和實時控制的串行通信網絡總線,最初由德國Bosch公司為汽車監測和控制而設計,后被用于其他工業部門的控制,應用范圍遍及整個控制領域。CAN總線數據通信具有安全、可靠、實時和靈活等特點,國際標準化組織為其制定了IS011898標準。
設備工作過程中產生的振動信號常常包含大量的設備狀態信息,特別是設備早期故障產生以及發展信息。通過對設備運行時振動信號的采集與分析,一方面可以實時在線監測設備的運行狀態,另一方面可以記錄設備發生異常或故障時的特征信息,據此可以進行進一步的故障分析和診斷。
1 系統總體架構
整個系統由CAN總線網絡數據采集器、網絡服務器和客戶端網絡瀏覽三部分組成,如圖1所示。系統通過在所需監測的設備上安裝包括振動和其他重要參數為主要測量對象的各種傳感器,獲取設備的狀態信息。數據采集器對上述信號進行采集并通過CAN總線傳送到應用程序服務器進行分析處理,處理結果存放到數據庫服務器。Web服務器負責信息的發布,客戶端通過瀏覽器訪問Web服務器發布的網頁,實現對所管轄設備的遠程監測和管理。系統一方面采用具有CAN總線功能的網絡數采器上傳監測數據,實現大范圍分布設備的監測;另一方面通過Internet/Intranet分布監測數據和信息,實現跨地域的遠程網絡化監測。
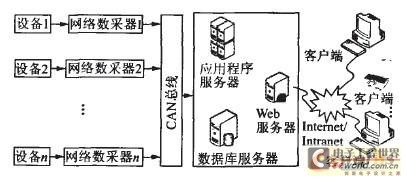
圖1 系統總體架構
2 CAN總線網絡數據采集
在系統架構圖1中,網絡數據采集器擔負著重要角色,是本系統的核心部分。本文設計的網絡數據采集器是一個全功能嵌入式多通道信號采集模塊,結構框圖如圖2所示,由傳感器、信號調理、信號變換、16通道模數轉換、微處理器和CAN總線接口等組成。來自一臺或幾臺相鄰設備的多達16通道包括振動在內的傳感器信號,首先經過信號調理電路得到相應的電信號,對于振動傳感器還需要進行所需的變換,如加速度變速度和速度變位移等處理。這些信號經過放大、抗混濾波以及極性變換后送到多路開關,模數轉換巡回采集所有通道信號,微處理器進行必要的處理后再通過CAN總線發送給應用程序服務器。
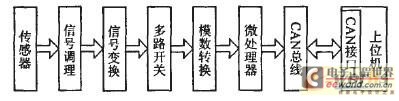
圖2 CAN總線數據采集模塊框圖
CAN總線數據采集模塊采用內核為CIP-51的嵌入式微處理器C8051F060。CIP-51具有標準8052的所有外設部件,同時內嵌符合CAN 2.0A(基本CAN)和CAN 2.0B(全功能CAN)的CAN總線控制器,包含一個CAN核、獨立于C8051的消息RAM、一個消息處理狀態機以及控制寄存器等。C8051F060的CAN控制器可達到1Mb/s速率。CAN有32個消息對象,每個消息對象有自己的標識掩碼,用于對接收到的消息進行過濾。輸入數據、消息對象和標識掩碼存儲在CAN消息RAM中。與數據發送和接收過濾有關的所有協議處理均由CAN控制器完成,不需MCU干預,使得用于CAN通信的CPU帶寬最小。通過C8051F060特殊功能寄存器可以配置CAN控制器以及接收和發送數據。
CAN總線數據采集模塊一方面要完成多通道數據采集,另一方面還要進行數據通訊,其程序流程如圖3所示。

評論