基于CAN總線的無刷直流電動機模糊自適應PID控制器設計

本文引用地址:http://www.104case.com/article/201612/331547.htm
4 軟件實現
主要程序流程圖如圖11所示。


5 實驗結果及分析
電動機主要參數如下:額定功率PN=22 kW,磁極對數p=25,定子相繞組電阻為R=0.347 ,電感為L=0.03H,額定轉速為nref=180 r/min,轉動慣量為J=5.636 65 kgm2。
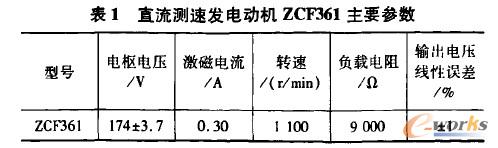
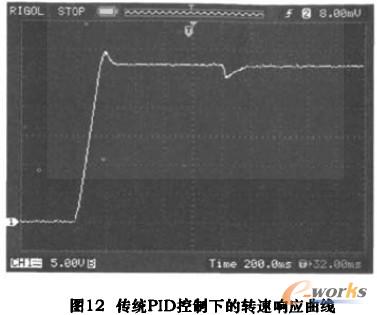
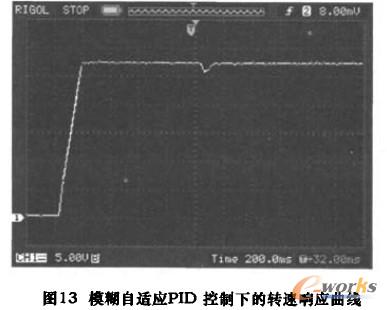
實驗中對BLDCM調速系統分別采用傳統PID控制和模糊自適應PID控制。系統空載起動進入穩態后,在t=2.0s時突加800 N·nl的負載。為了直觀地反映速度,實驗中安裝了直流測速發電動機ZCF361,其主要參數如表1。傳統PID控制系統和模糊自適應PID控制的轉速響應曲線如圖12、13所示。
對比實驗結果可知,使用模糊自適應PID控制,系統無超調,能很快進入穩定狀態;并且在突加負載時,使用模糊自適應PID控制,轉速能夠很快地恢復到平衡狀態,系統具有較強的抗干擾能力。結果表明應用模糊自適應PID的控制系統具有更好的魯棒性。
6 結語
針對無刷直流電動機調速系統性能的要求,設計了基于CAN總線的無刷直流電動機模糊控制器。并通過實驗證明,此系統通過集中管理與分散控制很好地實現了多臺直流無刷電動機間快速協調控制的同時,模糊自適應PID控制技術提高了系統的魯棒性,收到了滿意的控制效果。

評論