基于CAN總線的無刷直流電動機模糊自適應PID控制器設計


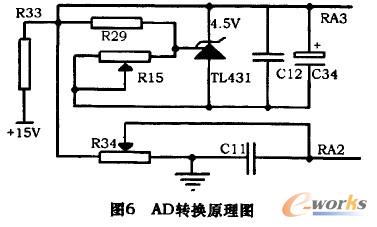
3.4 AD轉換單元(圖6)
此部分中,TL431用來產生AD轉換的參考電壓4.5V,其中R33的選取是關鍵。R34的作用是完成速度給定及Kp、Ki、Kd的初始設定。
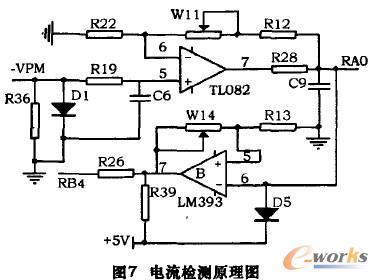
3.5電流檢測單元(圖7)
此部分對母線電流進行實時檢測,通過TL082對采樣電阻R36的電壓進行放大后,再由R28與C9進行濾波。然后一路進入PIC的RAO引腳進行AD轉換;另一路經過LM393與參考電壓進行比較后將信號送給PIC的RB4引腳,同時并將此信號送給外部硬件電路用作過電流保護。
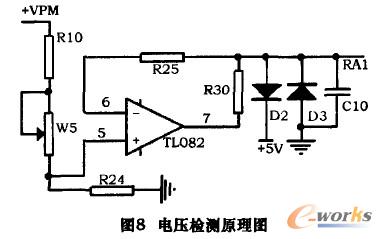
3.6電壓檢測單元(圖8)
此部分通過R24對母線電壓進行采用,并通過由TL082構成的跟隨器將信號送給PIC的RAl進行AD轉換,進而判斷電壓情況,作為泄放、保護與調速的依據。
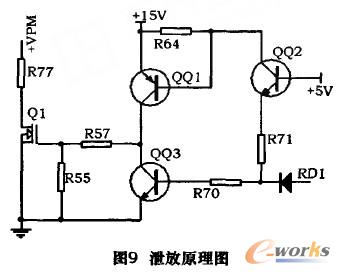
3.7泄放單元(圖9)
系統通過此部分完成對主電路電容電荷的泄放任務。在系統正常工作期間,當電源電壓高于一定值時或系統因故障或正常停機時,通過功率電阻R77泄放電容電荷。
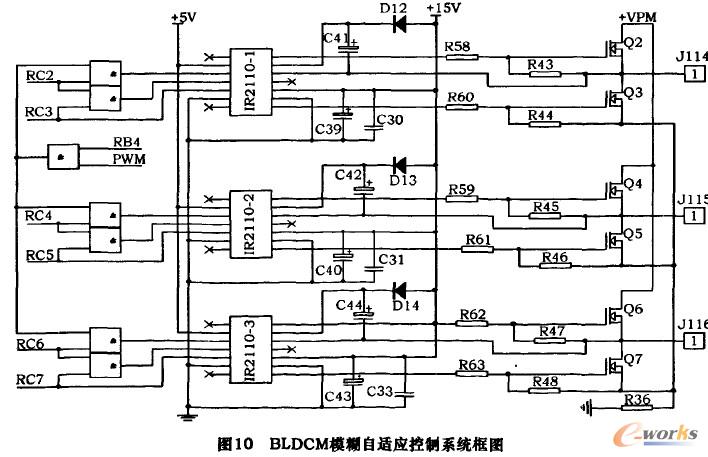
3.8邏輯換相及保護與驅動單元(圖10)
系統在此部分完成邏輯換相、互鎖、過流保護與驅動任務。由于IR2110采用自舉原理,所以C41、CA2、C44的取值大小要根據實際通過實驗確定,這里選用0.47 uF;系統采用上半橋PWM。

評論