OMRON以太網在成品庫中的控制應用

3.2 以太網現場控制設計
為實現立體庫的現場控制項目改造要求,在實現以太網通信的基礎上需要對PBS立體庫的自動控制進一步研究。控制要點在于大量的現場數據采集和通信控制。當雪橇到達NEPID讀取滾床位置后,雪橇停止,由可編程控制器輸出請求信號給NEPID系統,請求NEPID系統設定盤讀取NEPID卡的信息。NEPID系統設定盤分析讀取的信息好壞,并輸出NEPID系統設定盤的OK或報警信號。當NEPID系統設定盤檢測信息有問題,輸出NEPID系統設定盤報警信號,并發出聲光報警信號,通知操作人員處理。當雪橇控制系統檢測到NEPID系統設定盤有報警信號時,該滾床停止,不做任何動作。直到雪橇控制系統檢測到NEPID系統設定盤的OK信號后,才能控制雪橇前進,并發出清除OK信號給NEPID系統設定盤。實現PBS的搬入控制、搬出控制、搬出分支控制,搬出計劃調度和進入總裝進程控制。
現場確認及控制信號如圖2所示。
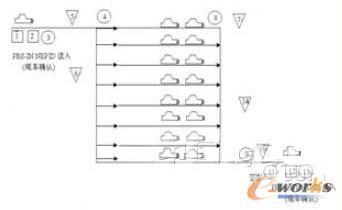
圖2 PBS庫現場確認及控制信號圖
在圖2中:1表示到位信號(DI-P) (PLC→NEPID:1Bit);2表示空實信號(DI-P) (PLC→NEPID:1Bit);3表示OK,NEPID系統設定盤報警信號信號 (NEPID→PLC:2Bit);4表示搬入道指示信號(DO-P) (Server→PLC:4Bit);5表示通過信號(DI-P) (PLC→Server:1Bit);6表示搬入側設備異常信號(DI-S) (PLC→Server:496Bit);7表示搬出指示要求信號(DI-P) (PLC→Server:1Bit);8表示搬出道指示信號(DO-P) (Server→PLC:4Bit);9表示先行指示信號(DO-P) (Server→PLC:2Bit);10表示通過信號(DI-P)(PLC→Server:2Bit);11表示先行異常信號(DO-P) (Server→PLC:1Bit);12表示在位信號(DI-P) (PLC→NEPID:1Bit);13表示OK,NG信號 (NEPID→PLC:2Bit);14表示搬出側設備異常信號(DI-S) (PLC→Server:496Bit)。
為了實現通信控制和現場控制結合在一起工作,實現系統與上位機聯網,將所有的控制和請求信息都通過以太網來進行傳送,達到完全自動化生產管理的目的。
4.結束語
車載信息調度管理的自動化,已被國外各大汽車廠商廣泛使用,國內三大汽車廠商之一的東風汽車公司僅在其下屬的風神汽車有限公司推行這種方案,其余的廠家還在沿用人工讀取車載信息的生產模式。課題在緊密聯系產業動態的前提下研究應用工業以太網的應用。
目前,系統使用歐姆龍以太網技術已經完成了對成品庫的通信和控制。在現場,使用歐姆龍工業以太網與現場總線技術一起,實現了對成品庫的自動有效控制,達到了按計劃自動出入庫的設計要求。
在成品庫的控制中,新的管理系統具有數據自動更新和數據自動比較排序功能,使現場控制的穩定性大大提高。和原來的人工操作出入庫模式相比,準確率由82.4%升高到96%以上,對車身信息的控制實現了自動化,系統運行的安全可靠性也得到了保障。立體庫以太網控制還可以有效地對進入總裝的車身順序進行修正,對生產計劃進行更新,使更新生產計劃的周期大大縮短。

評論