基于TCP/IP協議實現上位機對UR機器人的遠程控制

2010年,德國學術界和產業界提出“工業4.0”的概念,即是以智能制造為主導的第四次工業革命,或革命性的生產方法。該戰略旨在通過充分利用信息通訊技術和網絡空間虛擬系統—信息物理系統相結合的手段,將制造業向智能化轉型。所以,近些年許多工業自動化廠商將自己的產品研發所考慮的一個重要方向定在是否能被遠程控制。另一方面,隨著國內人工成本的不斷上升以及工廠人員流動的不確定性,機器人產業是近幾年,相信也是未來幾年的朝陽產業。所以對于工業機器人在工廠生產中的遠程控制,是一個機器人集成方面比較不錯的課題。我們知道,在工業機器人的隊伍中,UR機器人是第一家在工業環境下工作的人機協作機器人,它以輕便、簡單、安全著稱。下面我們就來了解一下如何實現上位機對UR機器人的遠程控制。
本文引用地址:http://www.104case.com/article/201612/331255.htm2、UR機器人提供的基于TCP/IP協議的接口
TCP/IP協議源于1969年,是針對Internet開發的一種體系結構和協議標準,目的在于解決異種計算機網絡的通信問題。使得網絡在互聯時能為用戶提供一種通用、一致的通信服務。是Internet采用的協議標準。基于TCP/IP的通訊具有成本低、可靠性高、實用性強、性能高等特點,所以現在許多工業自動化產品都具有基于TCP/IP協議通訊的接口,從而實現設備與設備之間,設備與網絡之間的通訊。UR機器人在TCP/IP協議的基礎上,提供了豐富的接口用于與外部設備的交互,如表1所述。
端口接口描述
機器人作為服務器
502ModbusTCP協議,機器人作為服務器
22SSH/SFTP(安全文件傳輸協議)
29999Dashboard功能
30001第一客戶端端口,自動返回機器人狀態與補充消息
30002第二客戶端端口,自動返回機器人狀態與消息
30003實時反饋端口,自動返回機器人狀態與消息,125Hz實時反饋接口
機器人作為客戶端
自定義由UR腳本函數定義
502ModbusTCP協議,機器人作為客戶端
表1UR機器人TCP/IP接口表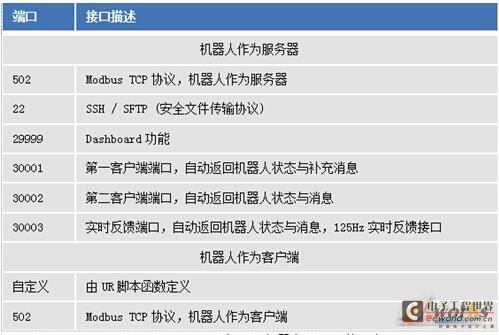

有了這些接口,上位機就可以遠程控制機器人。如圖1,簡單描述了上位機對UR機器人遠程監控的系統圖。

圖1遠程控制系統圖
下面我們就來介紹UR機器人所提供的相關通訊接口,從而遠程控制機器人。
3、ModbusTCP端口
MODBUS是OSI模型第7層上的應用層報文傳輸協議,它在連接至不同類型總線或網絡的設備之間提供客戶機/服務器通信。自從1979年出現工業串行鏈路的事實標準以來,MODBUS使成千上萬的自動化設備能夠通信。目前,繼續增加對簡單而雅觀的MODBUS結構支持。互聯網組織能夠使TCP/IP棧上的保留系統端口502訪問MODBUS。MODBUS是一個請求/應答協議,并且提供功能碼規定的服務。MODBUS功能碼是MODBUS請求/應答PDU的元素。
UR機器人既可以作為ModbusTCP服務器,也可以作為ModbusTCP客戶端,兩者的主要區別在于消息請求方的不同。在此,我們僅討論UR機器人作為ModbusTCP服務器的情況,如圖2所示。
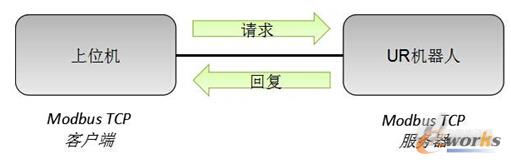
圖2ModbusTCP服務器
既然UR機器人作為ModbusTCP服務器,它必定有一系列Modbus地址供上位機來訪問。
地址類型描述
0-33Register可以訪問機器人的所有IO
128-255Register可配置寄存器
256-265Register機器人狀態
270-315Register關節位置、速度、電流、溫度、模式等信息
400-425RegisterTCP位置、速度、偏移等信息
768-770Register工具端狀態
0-159Bit可以訪問機器人的所有IO
260-265Bit機器人狀態
表2Modbus地址簡表
通過UR機器人的相關Modbus地址,我們可以訪問機器人的很多信息,進而可以把這些信息放到上位機上。下圖就是通過訪問Modbus地址,模仿Polyscope(UR機器人原版軟件),制作出來一個界面,當然我們可以通過這個界面監控并控制機器人的所用IO。

評論