通過無傳感器FOC控制提高電器電機控制的效率和成本效益

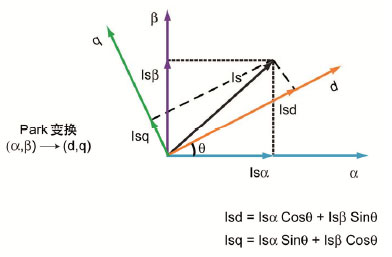
圖3 Park變換
當正弦輸入電流施加到定子上時,會產生旋轉磁通。轉子的速度與旋轉磁通矢量直接相關。磁通矢量必須始終與轉子磁極保持對齊,以使電機產生最大的轉矩。
圖4給出了整個過程的圖示,包括坐標變換、PI迭代、逆變換和產生PWM,還描述了FOC控制所需的功能。誤差信號根據Id、Iq和各自的參考值而產生。Id參考電流控制轉子磁通。請記住,只有在負載穩定的條件下,Id和Iq(代表轉矩和磁通)才具有時間不變性。Iq參考電流控制電機的轉矩輸出。PI控制器的輸出提供Vd和Vq,它們構成發送到電機的電壓矢量。新的變換角根據由Park逆變換產生的電壓和由Park變換產生的電流進行估計。
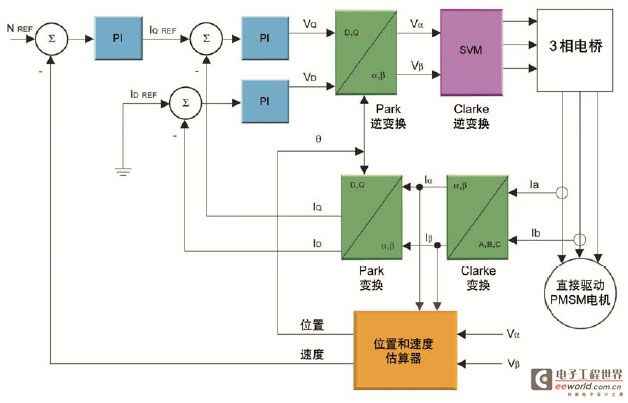
圖4 采用無傳感器FOC算法控制的直接驅動洗衣機PMSM電機的應用框圖
FOC算法使用新的變換角來確定下一個電壓矢量的位置。通過使用新的變換角,PI控制器的Vd和Vq輸出值被旋轉變換到靜止參考坐標系。該計算產生正交電壓值vα和vβ。下一步,對vα和vβ值進行逆變換,得到三相值va、vb和vc。三相電壓值用于計算新的PWM占空比值,產生所需的電壓矢量。
在FOC算法中,三相分離的PWM信號使用空間矢量調制(SVM)進行正弦波調制,并施加到電機的三相繞組。通過使用分流電阻,可以監視每個繞組中的電流,并將電流與基于電機特性的電氣模型進行比較。電機供應商會提供電機的繞組特性,雖然它們也可以使用繞組的電感和電阻值進行測量。轉子位置通過基于電機模型間接測量反電動勢(EMF)來計算。通過推導等于測量電流的估算電流,可以基于電機模型計算得到反電動勢。
采用FOC方法可以為PMSM電機功率管理帶來許多好處。例如,FOC可以改善PMSM電機的動態響應,為諸如洗衣機之類需要快速響應速度變化(洗滌和甩干過程中)的電器帶來好處。FOC支持以較低的電流產生最佳的轉矩,因為它可以控制電流的幅值和相位,并使定子和轉子磁場之間的角度保持90°。此外,由于FOC支持在每個PWM周期中控制電機電流,所以可以從根本上限制電流。

評論