數(shù)字PID控制及其改進(jìn)算法的應(yīng)用

轉(zhuǎn)臺(tái)是檢測和評價(jià)慣性導(dǎo)航與制導(dǎo)系統(tǒng)的主要測試設(shè)備。轉(zhuǎn)臺(tái)內(nèi)安裝的是力矩電機(jī),因此理想的轉(zhuǎn)臺(tái)的數(shù)學(xué)模型可以寫成直流力矩電機(jī)的數(shù)學(xué)模型,PID控制器各控制環(huán)節(jié)的作用是這樣的,比例控制(P控制)即時(shí)成比例地反應(yīng)控制系統(tǒng)的偏差信號e(t),積分控制(I控制)主要用于消除靜差,微分控制(D控制)反應(yīng)偏差信號的變化趨勢(變化速率)。比例控制是對現(xiàn)在誤差的一種校正,積分控制是對過去誤差的校正,而微分控制是對將來可能的誤差的校正。下面結(jié)合轉(zhuǎn)臺(tái)的控制過程對數(shù)字PID控制及其改進(jìn)算法作具體的討論。
1 Simulink仿真
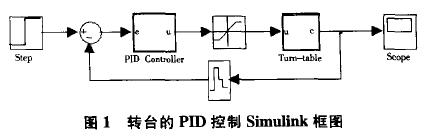
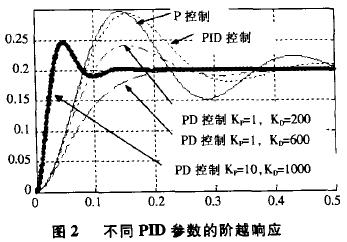
轉(zhuǎn)臺(tái)的PID控制的Simulink仿真框圖如圖1所示。其中包含了兩個(gè)子系統(tǒng)PID Controller(PID控制器)和Turn-table(轉(zhuǎn)臺(tái))。對理想模型進(jìn)行Simulink仿真實(shí)驗(yàn)。選用不同參數(shù)的PID控制器,它們對幅值為0.2的參考輸入的階越響應(yīng)的過程曲線如圖2所示。圖中實(shí)線為只采用比例控制,取Kp=1;點(diǎn)畫線、虛線和粗線均為采用比例微分控制,點(diǎn)畫線的KI=1,KD=200;虛線的Kp=1,KD=600;粗線的Kp=10,KD=1000;圖中點(diǎn)線為PID控制,Kp=1,KI=0.0005,KD=200。
分析圖2可得出:
① 對于理想的數(shù)學(xué)模型,不需要積分控制項(xiàng),只采用PD控制就夠了。由于積分控制項(xiàng)的目的只是消除靜差,所以在系統(tǒng)沒有靜差的情況下不要加入積分控制環(huán)節(jié),因?yàn)榉e分控制環(huán)節(jié)會(huì)惡化過程動(dòng)態(tài)特性,造成過大的超調(diào)量,并增加了調(diào)整時(shí)間;
② 不要忽視微分控制環(huán)節(jié)。要減小上升時(shí)間,增加系統(tǒng)的控制剛度,必然要求增加Kp,但過大的Kp會(huì)產(chǎn)生過大的超調(diào),甚至使系統(tǒng)振蕩,但增加Kp的同時(shí)只要增加KD一般都可以減小超調(diào),獲得較好的動(dòng)態(tài)特性。可以這么說,理想的數(shù)學(xué)模型,采用大參數(shù)的PD控制可以獲得足夠好的控制性能。但也不是說可以一味的增加KP和KD的值,因?yàn)镵P值越大,控制量u也越大,消耗的能量也越多,而且u受飽和限制。
運(yùn)用PD控制在實(shí)際轉(zhuǎn)臺(tái)系統(tǒng)中時(shí),有較大的穩(wěn)態(tài)輸出誤差,并且輸出波動(dòng)較大。分析原因如下:
① 由于功率放大器有較大的死區(qū),而且轉(zhuǎn)臺(tái)的機(jī)械系統(tǒng)存在有靜摩 擦力,使實(shí)際的被控系統(tǒng)有較大死區(qū)。所以控制器如果沒有積分環(huán)節(jié),穩(wěn)態(tài)輸出有較大的靜差;
②實(shí)際的被控系統(tǒng)總是會(huì)受到許多干擾,包括各種不確定的系統(tǒng)噪聲和量測噪聲。過大的KD會(huì)放大噪聲,使系統(tǒng)的輸出波動(dòng)較大。

評論