正確設置FHPP協議模式下的CAN參數

然而在實際應用中,當我們選用了CMMD或者2個以上CMMS驅動器,按常規方案架設好CANopen網絡,在總線運行中就會發現:低位數據區(排在CAN網絡前面)的那個伺服控制器上的CAN指示燈是熄滅的,但是馬達控制器不報錯,FHPP通訊卻死活也激活不出來!
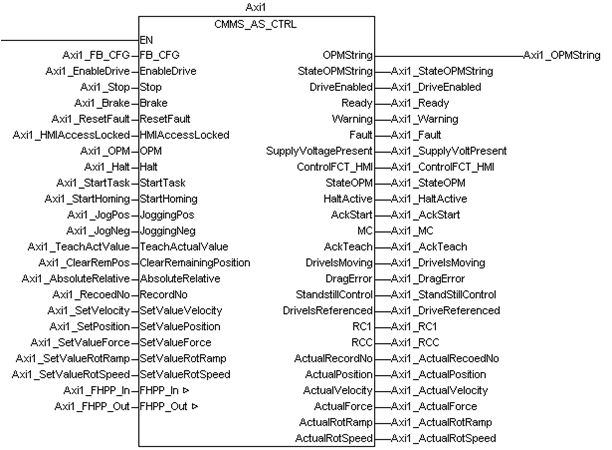
觀察PLC程序,通常會發現1號軸功能塊里的FHPP_In、FHPP_Out數據是異常的。這種情況下,采用常規手段,例如:修改編寫PLC程序、用FCT刷固件、用FCT恢復出廠設置后新建再下載項目、優化外圍電路與電能質量等等,哪怕是更換上新的控制器,都是沒用的。怎么辦?
冷靜思索下,發現還是FHPP協議的特殊性,使其CAN通訊參數也不能采用常規設置,問題是設置哪些參數,設置為多少呢?有必要牢記以下這幾張CODESYS中的CAN參數截圖(見圖一、圖二),適用于幾乎所有采用FHPP協議通訊的場合!
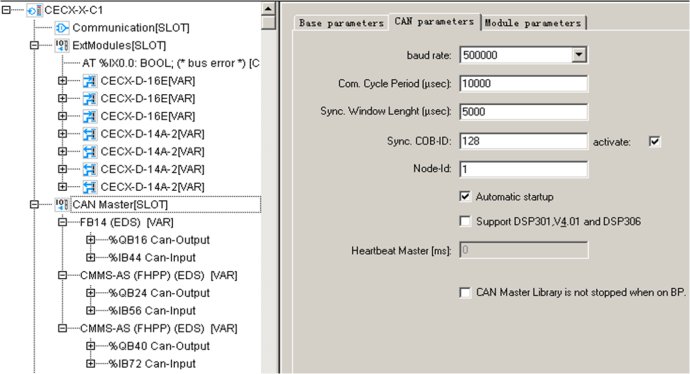

以后我會詳解這些參數。

評論