目前,較流行的現場總線主要有:CAN、LonWorks、PROFIBUS、HARR、FF等。1CAN(控制器區域網絡)
本文引用地址:http://www.104case.com/article/201612/329802.htm控制器區域網絡CAN(ControllerAreaNetwork)是德國Bosch公司為汽車的監測和控制而設計的,逐步發展到用于其它工業部門的控制。CAN已成為國際標準化組織ISO(InternationalStandardsOrganization)11898標準。
CAN有如下的特性:
1CAN通信速率在10km范圍內為5kbit/s;在40m內為5Mbit/s,節點數110個,傳輸介質為雙絞線(桔黃色為主線色+其它顏色的色條)和光線等。
2CAN采用點對點、一點對多點及全局廣播幾種方式發送/接收數據。
3CAN可實現全分布式、多機系統,且無主、從機之分,每個節點均可主動發送報文。用此特點可方便地構成多機備份系統。
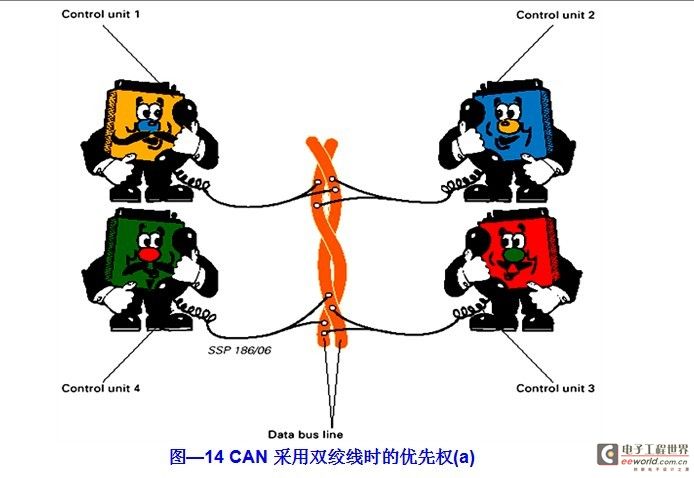
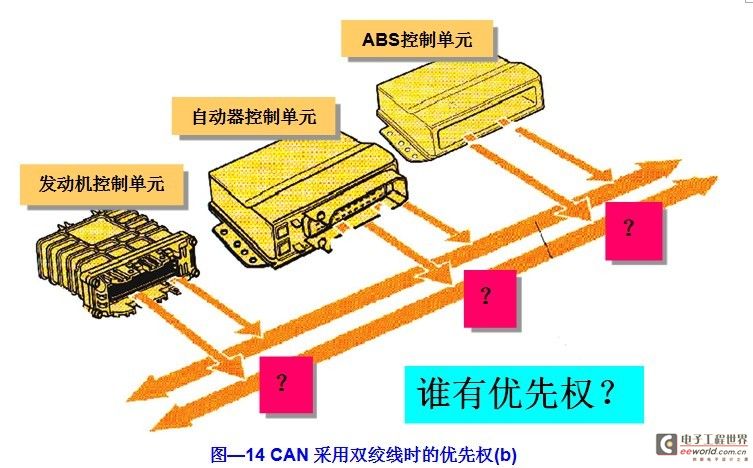
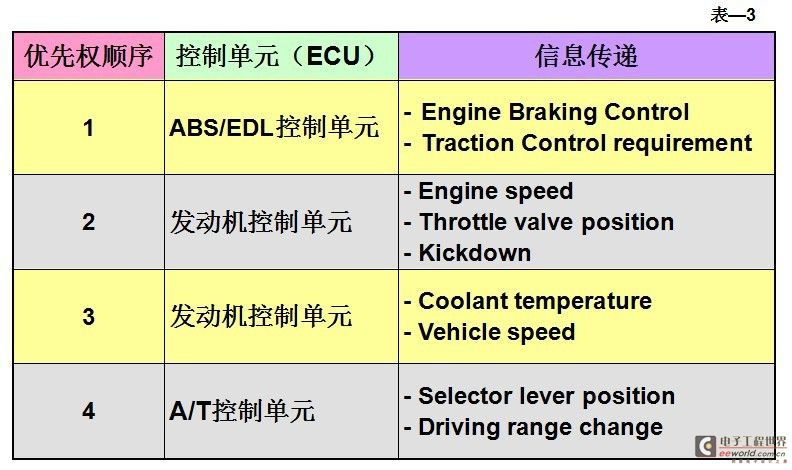
4CAN采用非破壞性總線優先級仲裁技術,當兩個節點同時向網絡上發送信息時,優先級低的節點主動停止發送數據,而優先級高的節點可不受影響地繼續發送信息。按節點類型分成不同的優先級,可以滿足不同的實時要求,如圖—14和表—3中所示。
5CAN支持4類報文幀、遠程幀、出錯幀、超載幀。采用短幀結構,每幀有效字節數為8個。這樣傳輸時間短,受干擾的概率低,且具有較好的檢錯效果。
6CAN采用循環冗余校驗CRC及其它檢錯措施,保證了極低的信息出錯率。
7CAN節點具有自動關閉的功能,當節點錯誤嚴重的情況時,則自動切斷與總線的聯系。這樣可以不影響總線的正常工作。
要素組成。
功能塊參數分為3個層次:第1層由FF定義,第2層由用戶集團定義,第3層由制造廠定義。
為了支持功能塊模型的標準化和互操作性,FF定義了兩個工具,即設備描述語言DDL和對象字典OD,用來定義和描述AP的“網絡可見”的對象,如功能塊及其參數。
此外,還有網絡管理NM(NetworkManagement)和系統管理SM(SystemManagement)等。


評論