基于SVM不對稱六相永磁電機控制系統的設計方案

永磁同步電動機(PMSM)因其高功率密度、高轉矩和免維修等原因,廣泛應用于高效驅動領域。六相永磁同步電動機發展了三相永磁同步電動機的結構,多應用于船舶電動推進等領域,它相對于普通永磁同步電動機而言有諸多優勢,如船舶推進系統中,電流諧波最低次數要比一般三相電機高,降低了諧波幅值,提高了系統穩定性,減小轉矩脈動,提高了電機工作效率,同時減小了轉子諧波損耗,另外一旦發生缺相等故障,系統仍然可以繼續運行。
本文引用地址:http://www.104case.com/article/201612/329412.htm隨著電力電子技術的發展,電機變頻調速系統在各種領域迅速發展和應用。直接轉矩控制策略是在矢量控制策略之后最新興起的變頻調速技術,具有結構簡單,動態響應快,魯棒性強等優點。該技術最早是二十世紀80年代由德國教授Depenbrock和日本學者Takahashi分別提出的。主要應用于感應電機控制系統。于90年代末由L Zhong、M.F.Rahman和Y.W.Hu等人將其應用到永磁同步電機控制中。
本方案中所介紹的這種六相永磁同步電機具有六相不對稱的結構,是一種船舶推進用電機。在Simulink中沒有對應的模型。文章對六相電機模型進行分析同時進行了建立數學模型,并用Simulink對電機進行建模并封裝。本文使用Simulink對不對稱六相永磁同步電機直接轉矩控制系統設計和仿真。同時對直接轉矩控制系統進行建模,完成整個系統的搭建,同時加入空間電壓矢量控制提高系統穩態轉矩和電流,降低轉矩脈動,并且對仿真結果進行了簡單分析。
2.不對稱六相永磁同步電機的數學模型
六相PMSM數學模型與$三相電動機很相似,為使分析方便,假設:①不考慮鐵心飽和效應;②渦流和磁滯損耗忽略不計;③轉子不設阻尼繞組;④認為每相繞組完全對稱,定子電流、轉子磁場對稱分布;⑤近似認為反電動勢波形為正弦。
坐標變換。
在PMSM瞬態運行過程中,對電機運行狀態方程的求解和電機動態分析相當困難,主要原因是電機轉子在磁、電結構上不對稱,以及電機的電磁參數(電壓、電流、磁鏈、轉矩)的微分形式具有多種表達方式。因而在此采用坐標變換,通過消除時變參數,將變系數轉化為常系數來求解,進而簡化運算和分析過程。
本文采用兩相旋轉坐標系(dd-qq坐標系)來對PMSM電機的穩態性能進行分析,同時也可以對其瞬態性能進行分析。本文所采用的坐標系與定子磁場保持同步狀態,dd軸滯后qq軸90°,dd軸的取向與轉子總磁鏈的方向一致,成為轉子磁場坐標系,A、B、C、D、E、F坐標系統與dd-qq坐標系的關系如下為六相靜止坐標系到兩相旋轉坐標系的變換矩陣可以表示為式(1):

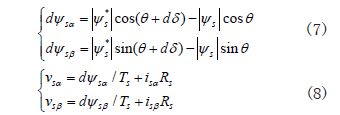
經過坐標變換可得,d-q坐標系下六相PMSM定子側的電壓方程、同時六相永磁同步電動機的磁鏈方程和轉矩方程如式(2)-式(6)。

其中:Ud、Uq為d、q定子的電壓分量;id、iq為d、q軸定子的電流分量; d ψ 、q ψ 、為d、q軸定子磁鏈分量;Ld、Lq為d、q軸電感分量;R為定子電阻;np為極對數; sω 為同步角速度;f ψ 為永磁體磁鏈;p為微分算子d/dt.
通過6/2變換,極大的簡化了兩相旋轉坐標系下的六相PMSM的數學模型,降低了微分方程階數,d軸磁鏈d ψ 和q軸磁鏈q ψ 不再是角度θ 的函數,這為$六相永磁同步電機的高性能轉矩控制打下了堅實的基礎。
在仿真過程中由于Simulink中沒有現成的六相永磁同步電機模型,于是根據數學模型式(1)~(6)建立了六相永磁同步電機電機模型并對其進行了封裝封裝。
3.不對稱六相永磁同步電機的直接轉矩控制系統構成
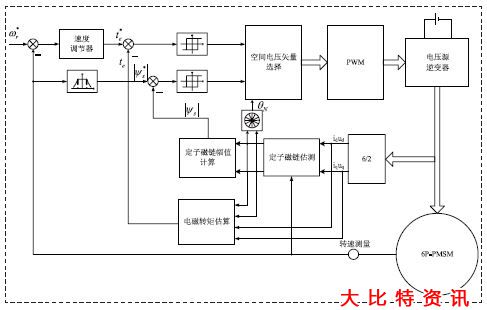
對于永磁同步電機的直接轉矩控制,其主要思想是在保證定子磁鏈幅值恒定的前提下,根據電機的負載角δ 和電磁轉矩的正比關系,通過控制定子磁鏈的旋轉方向來控制負載角δ進而控制電機的電磁轉矩。δ 是定子磁鏈與轉子磁鏈矢量相對于A軸的空間電角度的空間相位差。不對稱六相永磁同步電機直接轉矩控制系統組成結構如圖1所示,系統包括:$電動機模塊、逆變器模塊、坐標變換模塊、定子磁鏈觀測模型、轉矩估測模型、磁鏈和轉矩的滯環比較器模塊,定子磁鏈分區表、以及電壓空間矢量表。
通過公式(6)可知,改變相應的定子電壓矢量以控制定子磁鏈的旋轉方向進而調節負載角δ 的大小,最終能夠得到所需要的電機電磁轉矩。
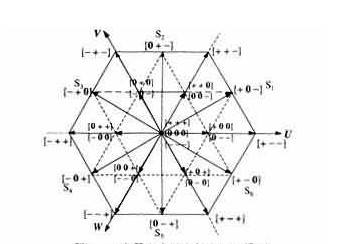
基于SVPWM不對稱六相永磁同步電機直接轉矩控制系統中不同磁鏈矢量之間的關系如圖2.通過分析對不對稱六相永磁同步電機的磁鏈矢量與電壓矢量之間的關系,最終得到參考的電壓矢量的計算公式。
定子磁鏈的估測采用U-I模型,通過檢測出定子電壓、電流計算出定子磁鏈。同時根據定子電流和定子磁鏈,可以估測出電磁轉矩。
磁鏈滯環模塊所示,它是用來控制定子磁鏈幅值,使電動機容量得到充分的利用。
磁鏈滯環模塊采用兩點式調節,輸入量為磁鏈給定值*s ψ 和磁鏈幅值的觀測值s ψ ,輸出量為磁鏈開關量Δψ ,其值為0或者1.轉矩滯環模塊的結構圖,它的任務是實現對轉矩的直接控制,轉矩滯環模塊為三種輸出開關量,輸入量為轉矩給定值*e t 和轉矩估測值f t ,輸出量為轉矩的開關量ΔT,其值為±1和0.
不對稱六相PMSM-DTC優選空間電壓矢量的構建和開關表的確定:
根據不同的導通模式,$六相電機變頻器輸出有64種空間電壓矢量組合,包括16個零電壓矢量以及如圖2所示的48種電壓矢量,可以看作是四個同心正12邊形。本文選取了最外環的十二個電壓矢量(即為:v9、v11、v27、v37、v45、v41、v26、v18、v22、v54、v52、v56)可以獲得的調速性能,以及更快的轉矩響應和磁鏈變化。本文采用最外環的十二個電壓矢量角分線作為分區邊界的分區方式。
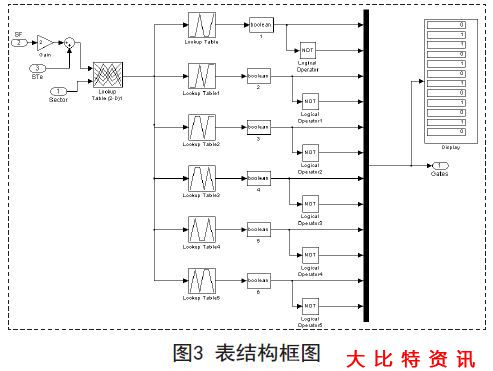
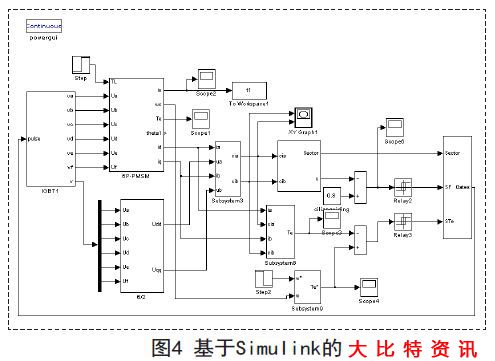
利用Simulink的查表模塊實現開關表設計及查表功能,實現電壓開關矢量的控制信號的輸出器仿真模塊的結構框圖如圖3所示。
基于不對稱六相永磁同步電動機直接轉矩控制系統的原理,在Matlab2012a境下利用Simulink仿真工具,搭建基于不對稱六相永磁同步電動機直接轉矩控制系統的仿真模型,整體設計框圖如圖4所示。
4.仿真驗證
PMSM參數設定:定子電阻2.875 s R = Ω ,d - q 軸等效電感0.0085H d q L = L = ,轉子磁鏈圖5中(a)、(b)、(c)分別為該系統空載啟動、0.2s時突加負載20N·m的轉速、相電流、轉矩仿真波形。圖5(d)為負載的定子磁鏈軌跡。
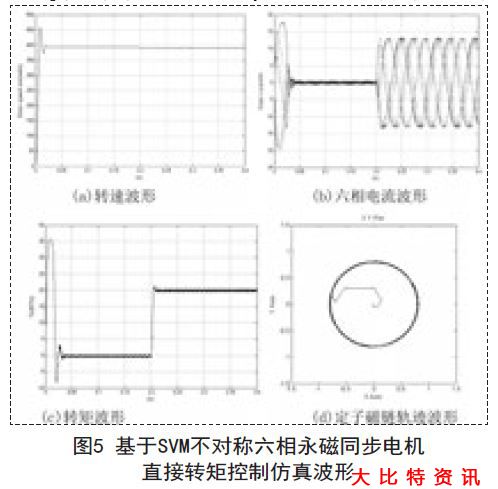
圖6為常規六相永磁同步電機直接轉矩控制系統空載啟動的轉矩實驗波形。可以看出,由于將SVM引入六相永磁同步電機的直接轉矩控制中,使得穩態轉矩和穩態電流得到了徹底的改善。
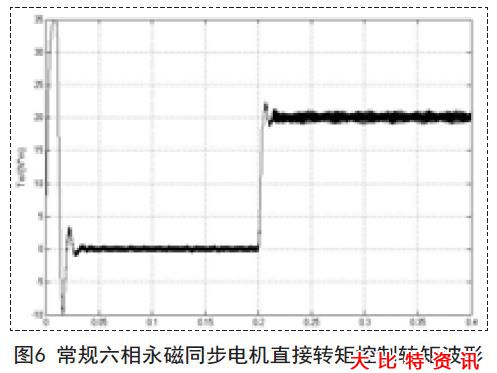
為了完全補償系統轉矩和定子磁鏈誤差,將SVM引入不對稱六相永磁同步電機的直接轉矩控制中,用以增加電壓矢量的數量,在改善穩態性能的同時,也使得逆變器的開關頻率變為近似恒定。仿真結果顯示,在$直接轉矩控制方案下,該永磁同步電動機驅動系統具有結構簡單,穩定性,快速跟蹤的性能優點。SVPWM允許逆變器在過調制區域運行。
5.結論
本文給出了基于SVM不對稱$六相永磁電機控制系統設計方案。方案根據不對稱六相永磁同步電動機直接轉矩控制系統框圖,并利用Matlab的Simulink全面完成了對基于直接轉矩控制的不對稱六相永磁同步電機控制系統的設計。從磁鏈方程和轉矩方程,可以證明不對稱六相永磁同步電機直接轉矩控制的基本原理與三相永磁同步電機是基本一致的,根據直接轉矩控制的基本原理對不對稱六相永磁同步電機直接轉矩控制進行了詳細的建模。與傳統的系統相比,該控制策略考慮逆變器作為一個單獨的單元,大大降低了系統復雜性。仿真結果最后得出DTC-SVPWM技術具有獨特的PMSM驅動的良好的動態特性。定子磁鏈軌跡趨近磁鏈圓,具有快速的轉矩響應。

評論