風光互補并網發電系統設計實現

1.1 引言
本文引用地址:http://www.104case.com/article/201612/326335.htm隨著世界經濟的迅速發展,環境問題與能源危機日益突出,可以說,環境問題和能源危機已經成為當今世界人類所面臨的最大威脅之一。因此新能源的探求與利用已經成為世界的研究熱點。中國擁有豐富的新能源可供開發使用,但開發使用率普遍較低,但隨著社會經濟的發展,新能源也在穩步想商品化能源的方向轉變。
1.2 項目背景
太陽能與風能是目前應用比較廣泛的兩種可再生能源,他們有著自身的優點:取之不盡用之不竭,就地可取無需運輸,分布廣泛可靠性高,綠色能源利于生態。但也有一些弊端:1.能量密度低;2.能量穩定性差。正因如此,一個平穩清潔的電能轉化并網系統顯得尤為重要。
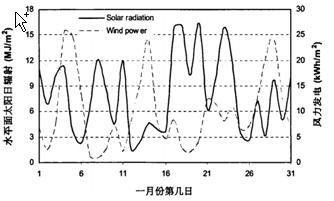
太陽能與風能在時間上有很強的互補性(如右圖),白天陽光最強時,風很小,晚間沒有陽光卻有很強的風,利用這兩種可再生資源的互補性,會使發電系統在資源上具有最佳的匹配性。風光互補并網發電系統在緩解電網壓力、電力調峰、節能減排等方面都能夠起到重要的作用。
本項目旨在使每個家庭都可以使用新能源,將太陽能與風能這兩種時間上互補的能源結合起來,并通過技術手段平穩轉化為50Hz交流電,使每個家庭用既是電能消費者,又是電能制造者。本項目具有綠色環保,減輕電力系統負擔等優點。
二、需求分析
2.1 功能要求
風能與太陽能平穩逆變成交流電,并自動選擇時機并網,使太陽能風能供電與電網的接入,實現其監測(雙向電量的計量);
實現電源變換時,負載啟動、停止時對電網諧波影響的監測控制;
欠壓和過流保護;
太陽能電池板最大功率點追蹤;
采集各個部分的電壓電流數值,計算效率,諧波大小和產生的功率,顯示并發回上位機;
檢測電網動作,防止孤島效應的發生;
檢測電網電能質量,記錄用電記錄;
考慮與上位機通訊,給用戶提供用電指導,如當前電價,用戶用電量等。

圖1 系統架構
2.2 性能要求
1.諧波總失真系數THD<4%;
2.系統效率>85%;
三、方案設計
3.1 系統功能實現原理
1、利用SPWM 調制原理
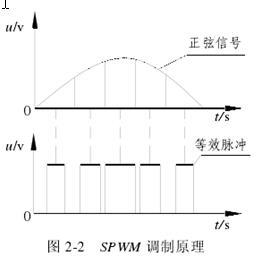
SPWM 調制原理見圖 2-2,可以看出,等效的脈沖寬度是按正弦規律變化的。根據采樣控制理論,脈沖頻率越高,SPWM 波形便越接近正弦波。逆變器的輸出電壓為 SPWM 波形時,其低次諧波得到很好地抑制和消除,高次諧波又能很容易濾去,從而可得到畸變率極低的正弦波輸出電壓。
SPWM 控制方式就是對逆變電路開關器件的通斷進行控制,使輸出端得到一系列幅值相等而寬度不相等的脈沖,用這些脈沖來代替正弦波或者其他波形。
調制原理從理論上講,在給出了正弦半波頻率、幅值和半個周期內的脈沖數后,脈沖波形的寬度和間隔便可以準確計算出來。然后按照計算的結果控制電路中各開關器件的通斷,就可以得到所需要的波形。但在實際應用中,人們常采用正弦波與等腰三角波相交的辦法來確定各矩形脈沖的寬度。等腰三角波上下寬度與高度成線性關系且左右對稱,當它與任何一個光滑曲線相交時,即得到一組等幅而脈沖寬度正比該曲線函數值的矩形脈沖,這種方法
稱為調制方法。希望輸出的信號為調制波,把接受調制的三角波稱為載波。當調制信號是正弦波時,所得到的便是 SPWM 波形。
2、DC-AC整體結構和工作原理
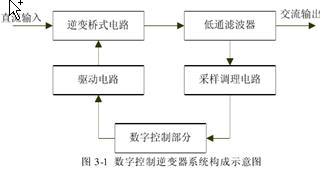
數字控制逆變器的系統構成示意圖如圖3-1所示,包括逆全橋逆變電路、低通濾波器、驅動電路、數字控制部分、采樣調理電路等五部分。保護功能是由數字控制部分采樣并執行。
逆變橋式電路主要實現電能的變換,把直流電壓變換為高頻矩形脈沖形式的交流電壓,低通濾波器把脈沖電壓變為光滑的工頻交流電。采樣調理電路用來采樣輸出的狀態變量,并把變量調節為數字控制平臺接受允許范圍內的信號。數字控制部分是主要的運算處理環節,運用合適的算法和措施,使輸出滿足系統設計的要求,驅動電路是執行環節。
3、MPPT的控制方法
圖2 中的電壓檢測模塊用來實現最大功率點跟蹤(MPPT)功能,由控制器的AD采樣輸入電壓Ud,與最大功率點(假設為30V)進行比較,采用PI算法進行調節。當Ud大于30V時,減小SPWM調制信號的幅度,當Ud小于30V時增大SPWM調制信號的幅度,從而使實現最大功率點跟蹤功能。
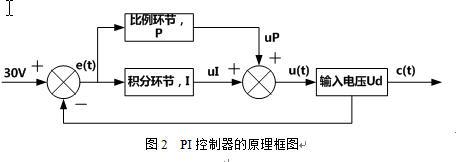
圖2 PI控制器的原理框圖
PI控制器的原理框圖如2 所示。PI控制算法采用增量式PI控制算法,它的目標輸入量是輸入電壓Ud的幅值為30V時的AD輸入,實際輸入量是輸入的電壓Ud的AD輸入,它們之間的相減得到偏差信號e(t),然后用PI算式得到控制量的偏差,最后將控制量轉換為SPWM的控制數據,使整個系統成為一個閉環系統,實現對SPWM的控制。
4、同頻同相的控制方法
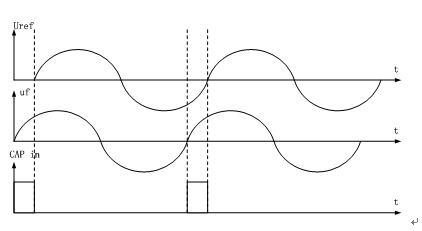
圖3 頻率相位信息圖
鑒相器模塊可實現同頻同相的控制。同頻同相的控制方法如圖3 所示,鑒相器通過硬件電路將反饋信號uf和參考信號Uref的頻率和相位信息通過矩形脈沖的形式反映出來,然后送往控制器的捕捉單元模塊或中端口,對上升沿和下降沿,以及上升沿到上升沿的時間進行計數,上升沿和下降沿的時間差就是uf和Uref的相位差,上升沿到上升沿的時間就是uf的頻率信息,然后通過軟件不斷的改變SPWM步長與累加器的數值,便可實現頻率跟蹤,通過對SPWM輸出起始地址不斷進行修正,實現相位跟蹤。
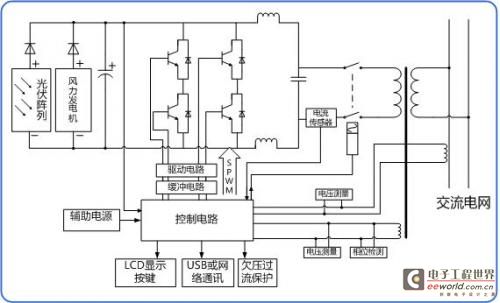
圖4 系統硬件結構框圖
3.2 硬件平臺選用及資源配置
本系統使用EVK1100開發板進行開發。
EVK1100是一個基于AVR32 AT32UC3A單片機控制器的評估套件和開發系統。它配備一系列豐富的外設、內存,并且可充分開發AVR32設備的全部潛能。
支持AT32UC3A

以太網端口
傳感器:光照、溫度、電位器
4x20藍色LCD(PWM變頻背光)
JTAG連接器、Nexus、USART、USB 2.0接口,TWI接口、SPI。
1、DC-AC逆變電路
DC-AC逆變電路完成將SPWM信號功率放大的功能,并且要求很高的放大效率。本系統選用IR2010浮柵驅動器對H橋進行驅動,該驅動芯片耐壓高達200V,輸出電流3.0A,輸出電壓10-20V,開通關斷典型時間分別為95ns和65ns。功率管選用高耐壓,導通電阻小,開關損耗小的高效MOS管IRFB23N15D。高效率的驅動電路和MOS管可以保證系統的整體效率。
如圖7 ,用兩個半橋驅動器IR2010組成一個全橋驅動電路。IR2010采用3.3V的邏輯電源和12V的低端驅動通道電源,直接將處理器產生的一對互補對稱的SPWM信號加到IR2010的邏輯信號輸入端,IR2010的驅動通道輸出端的SPWM信號是和輸入邏輯同相位的,因此可以實現對H橋的開關控制。IR2010的關斷控制端(SD)可以接收過流保護電路的關斷信號,來實現過流保護功能。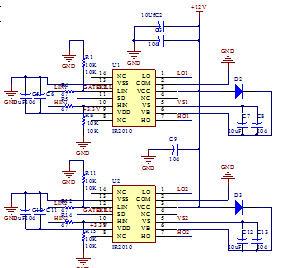
圖7 全橋驅動電路
H橋功率變換電路如圖8 所示,它由4個MOS功率管(IRFB23N15D)Q1~Q4構成,每個MOS管構成H橋的一個橋臂,OUT1、OUT2可以外接負載。由控制器產生的互補對稱的SPWM信號經過全橋驅動電路實現對H橋的開關控制:當Q2、Q3同時導通,Q1、Q4同時截止時,輸出電流方向由OUT1到OUT2;當Q1、Q4同時導通,Q2、Q3同時截止時,輸出電流方向由OUT2到OUT1,從而實現了DC-AC逆變。
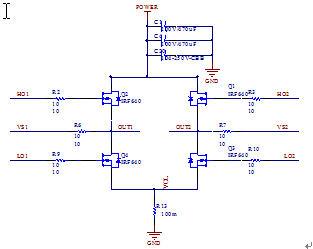
圖8 H橋開關電路
2、 過流檢測電路
如圖9 ,VOL管腳輸入來自H橋低端取樣電阻上的電壓,由電阻R16、R18、R20、R21決定預置的門限電壓,當采樣電壓高于門限時,比較器LM2903輸出上升沿,將觸發器74HC74的1D端高電平鎖存到1Q端,而1Q端連接至IR2010的SD端,從而關閉整個H橋輸出,實現過流保護。1Q端同時接到AT32UC3A的GPIO上,通過軟件檢測過流信號,一旦過流可以通過CLR信號將1Q清零,實現過流的自動恢復。
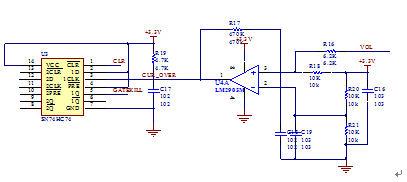
圖9 過流檢測電路
3、 輸入電壓檢測電路
如圖10,輸入電壓Ud通過電阻分壓,調理至合理的輸出范圍,以電壓跟隨器的形式接入運放,從而減小輸出阻抗,輸出信號Ud-OUT可以直接接到AT32UC3A上的ADC輸入引腳上。
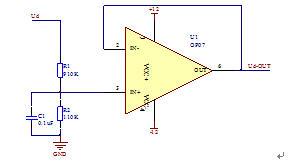
圖10 輸入電壓檢測電路
4、反饋電壓檢測電路
如圖11,通過有效值測量芯片AD637,將反饋信號Uf的有效值整理成直流分量送入AT32UC3A的AD輸入,從而可以在軟件中進行相應的幅度調整。
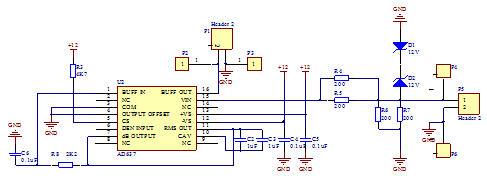
圖11 反饋電壓檢測電路
5、鑒相電路
鑒相電路如圖12所示,將反饋電壓Uf和正弦參考電壓Uref整形通過穩壓二極管和運放整形為矩形波,AT32UC3A根據矩形波電平進行計數,計數值反應頻率信息,因此根據計數值改變SPWM步長,便可實現頻率跟蹤。相位信息可以通過兩路矩形波的時差得到,兩路矩形波作為邊沿觸發器的時鐘信號,從而將矩形波的時差通過觸發器的輸出phase_out的高電平的脈沖寬度反映出來,phase_out接到AT32UC3A上的IO上,控制器根據該脈寬信號對SPWM輸出起始地址進行修正,實現相位跟蹤。
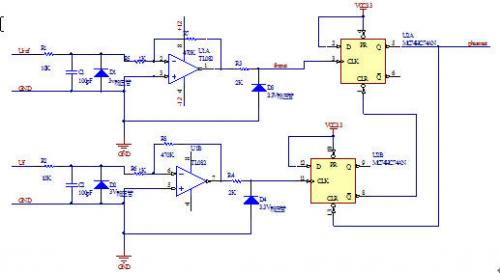
圖12 鑒相電路
3.3系統軟件架構
軟件結構圖
系統軟件設計采取模塊化設計方法,將完成特定功能的子程序組合成功能模塊,由主監控程序統一調用。軟件結構圖如圖13所示。系統軟件包含的主要功能模塊有:初始化模塊,中斷模塊,按鍵模塊和LCD模塊。
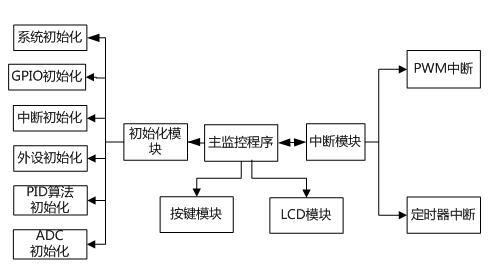
圖13 軟件總體框圖
3.4 系統軟件流程
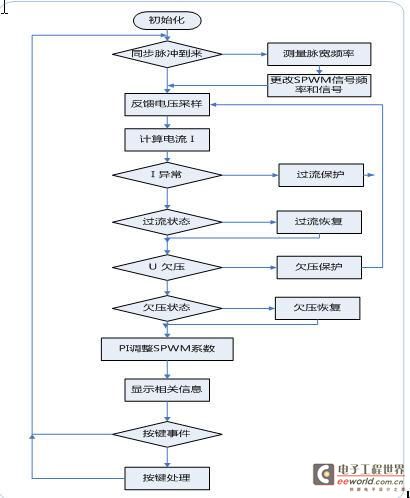
圖14 程序運行流程圖
3.4 系統預計實現結果
實物樣機:基于EVK1100的風光互補并網發電系統,包括逆變器,能量采集部分,用戶界面部分。

評論