相位噪聲對頻率步進雷達的影響仿真

作為高分辨率雷達之一,毫米波頻率步進雷達因具有極好的距離分辨率,而被越來越廣泛的使用。利用傅立葉逆變換(IFFT)實現(xiàn)頻率步進雷達一維成像的過程是:在自由空間中,發(fā)射機發(fā)射n個脈寬為t,載頻步長為Df的脈沖串,各載頻分別為fi=f0+iDf,其中i=0,1,2,…,n-1,重復周期為T,這n個脈沖的步進總帶寬B=(n-1)Df。發(fā)射的信號遇到距離為R并且徑向速度為v的目標后反射回超外差結構的接收機,經(jīng)過一次或多次下變頻后,對每個回波脈沖脈寬中心點進行正交采樣,最后對采樣數(shù)據(jù)作n點IFFT,即可獲得目標的一維距離像(Range Profile)。
本文引用地址:http://www.104case.com/article/201612/326254.htm在噪聲中檢測信號的能力是檢驗雷達系統(tǒng)性能好壞的關鍵,雷達系統(tǒng)只有從噪聲中有效地獲取回波信號的信息才能對目標進行檢測,而頻率源的相位噪聲是決定系統(tǒng)信噪比好壞及性能的關鍵要素之一。本文利用仿真工具Agilent ADS,對頻率步進雷達系統(tǒng)射頻部分進行建模,并使用Mathworks Matlab對模型輸出數(shù)據(jù)進行分析,通過這種數(shù)值仿真的方式能夠?qū)走_系統(tǒng)的各種參數(shù)進行量化分析。隨后,利用該仿真平臺對頻率源重要參數(shù)之一的相位噪聲對頻率步進雷達系統(tǒng)的影響進行,進一步給出對頻率源相位噪聲的要求,對實際系統(tǒng)的設計有一定參考價值。
2 頻率步進雷達模型構建
頻率步進雷達按照功能機構劃分可以分為天饋(Antenna)、頻率源(Frequency Synthesizer)、接收機(Receiver)和信號處理機(Signal Processer)四個部分,如圖1所示。其中的頻率源又包含為系統(tǒng)所需的發(fā)射機信號(Tx)和接收機所需的本振信號(LO)兩個部分。
圖1 頻率步進雷達構造
根據(jù)頻率步進雷達的構造,我們設計了如圖2所示的仿真平臺對其進行建模,通過對它的參數(shù)仿真結果的分析,達到對其性能評估的目的。
圖2 仿真平臺構造
該仿真平臺,主要由ADS和Matlab兩個工具軟件組成。其中ADS對頻率步進雷達的射頻部分進行模擬,主要包含發(fā)射機(Transmitter)、本振(Local Oscillator)、信道(Signal Channel)和接收機(Receiver)四個模塊構成,其輸出為基帶回波信號。該基帶回波信號,再由Matlab仿真平臺,根據(jù)頻率步進雷達信號處理的方式進行信號處理,便能夠得到目標的一維距離像。該仿真平臺的特點是將射頻電路與信號處理結合在一起,能夠?qū)ι漕l電路中的參數(shù)對于系統(tǒng)的影響進行直接分析,更接近于真實系統(tǒng)情況,有利于實際系統(tǒng)的設計。
3 相位噪聲影響分析
頻率步進雷達的性能好壞,由很多因素決定,僅分析其輸出噪聲部分,就包含大氣噪聲、幅度起伏、頻率誤差以及本振相位噪聲等[6]。以下將就相位噪聲對雷達系統(tǒng)的影響進行量化分析。
相位噪聲是衡量頻率短期穩(wěn)定度的一個重要指標,目前主要用阿倫方差和相噪功率譜密度,分別從時域和頻域兩個角度來描述。作為頻率穩(wěn)定度頻域表征的五冪律法,基本上適用于一切實際的振蕩源,包括最常見的白噪聲、閃爍噪聲和隨機游走等類型的噪聲效應。冪律噪聲表示法如圖3所示。
圖3 用冪律噪聲表示相位噪聲譜
圖3除了表述相位噪聲的來源以外,還表示出相位噪聲的出現(xiàn)將振蕩器的一部分功率擴展到相鄰的頻率中去,產(chǎn)生了噪聲邊帶。該噪聲邊帶會隨著接收機混頻的過程,而被調(diào)制到基帶信號中,成為基帶信號噪聲的一部分,從而惡化雷達系統(tǒng)檢測信號的能力。
假設一個工作在W波段94GHz附近的頻率步進雷達,其步進頻率為8MHz,共64個頻率點,脈沖寬度100ns,重復周期10ms,其理想的距離分辨率將達到0.3m。圖4是理想無噪聲情況下,數(shù)據(jù)在經(jīng)過128點IFFT的輸出圖形。為了提高邊帶抑制,輸出的結果經(jīng)過了“Hamming”加窗,為了分析比較,結果還進行了幅度的歸一化。
圖4 理想一維距離像
此時,假設頻率步進雷達中典型的一個頻率源的相位噪聲為表1所示
表1 頻率源相位噪聲
頻率偏移(Hz) | 相位噪聲(dBc/Hz) |
100 | -60 |
1k | -75 |
10k | -80 |
100k | -90 |
1M | -100 |
10M | -115 |
頻率源相位噪聲在被調(diào)制到基帶邊帶的過程中,如果雷達系統(tǒng)是相參系統(tǒng)時,會因為噪聲之間存在相關性[9]或者作用距離[10]而有一定的改善。為了分析方便,這里忽略該改善效應,即對相位噪聲的影響在最壞情況下進行分析。其設定的相位噪聲和仿真所用模型如圖5所示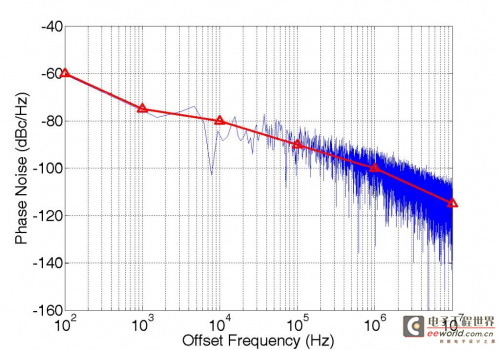
圖5 頻率源相位噪聲圖形
將該相位噪聲數(shù)據(jù)經(jīng)過ADS仿真平臺調(diào)制到基帶輸出后,再由Matlab進行分析,得到圖6。
圖6 相位噪聲影響
從圖6可以看出相位噪聲明顯造成距離像邊帶的惡化,但是不會影響雷達系統(tǒng)的距離分辨率。相位噪聲對雷達系統(tǒng)的影響,表現(xiàn)在,在多點目標情況下,小目標將會被淹沒在大目標的邊帶噪聲中,而不能被分辨,從而影響雷達在多點目標情況下對小目標的探測的性能。
隨后,對表1所列舉的相位噪聲在惡化10dB和改善10dB的情況分別進行分析,得到如圖7所示的結果。
圖7 不同相位噪聲情況下的影響分析
圖7顯示出,隨著相位噪聲的惡化,一維距離像的邊帶噪聲隨之惡化。而當相位噪聲改善到一定程度時,其一維距離像與理想情況差別不大,此時相位噪聲在系統(tǒng)中的影響可以被忽略。
根據(jù)以上的分析,我們設計出W波段的頻率步進雷達所需的頻率步進頻率源,其輸出的相位噪聲達到-90dBc/Hz@10kHz,測試結果如圖8所示。
所做頻率源的優(yōu)越相位噪聲特性,將保證W波段頻率步進雷達系統(tǒng)具有良好的多目標分辨能力。
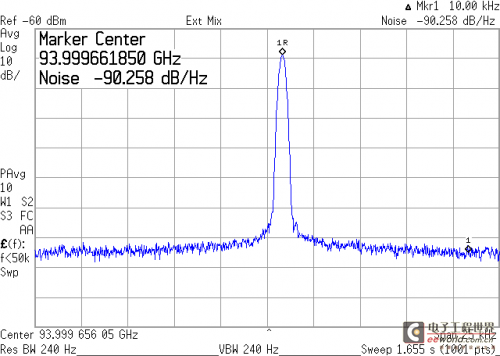
圖8 實作頻率源相位噪聲測試
4 結論
本文采用ADS和Matlab工具,對毫米波頻率步進雷達系統(tǒng)進行建模和性能評價。著重分析了頻率源重點參數(shù)之一的相位噪聲對雷達系統(tǒng)一維距離成像的影響。發(fā)現(xiàn)相位噪聲主要影響頻率步進雷達在多目標情況下,對小目標的探測能力。然后通過數(shù)值仿真的方式對相位噪聲對頻率步進雷達系統(tǒng)的影響進行量化分析。進一步分析得到頻率源的相位噪聲達到一定程度時,對于系統(tǒng)的影響可以被忽略,最后根據(jù)該分析結果,設計了一套W波段的頻率步進頻率源,其相位噪聲為-90dBc/Hz@10kHz,以保證毫米波頻率步進雷達系統(tǒng)的性能不受相位噪聲影響。根據(jù)該仿真平臺,還可以對頻率步進雷達的其它參數(shù)進行分析,比如接收機噪聲系數(shù)、帶寬和增益分配,以及系統(tǒng)頻率步進大小,脈寬選擇和重復周期選擇等等各項參數(shù)的影響,進行量化分析,達到為確定頻率步進雷達系統(tǒng)參數(shù)選擇和指標的分配提供仿真依據(jù)的目的。

評論