STM32 的I2C 硬使用

操作對象為一24C02
*/
#include "STM32Lib\stm32f10x.h"
#include "hal.h"
//#define AT24C01A//24C01A,I2C時序和往后的24C02一樣
#define AT24C01//24C01,I2C的時序和普通的有點不同
#define EEPROM_ADDR0xA0
#define I2C_PAGESIZE4//24C01/01A頁緩沖是4個
void I2C_Configuration(void)
{
I2C_InitTypeDef I2C_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1,ENABLE);
/* PB6,7 SCL and SDA */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
I2C_DeInit(I2C1);
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = 0x30;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 100000;//100K速度
I2C_Cmd(I2C1, ENABLE);
I2C_Init(I2C1, &I2C_InitStructure);
/*允許1字節(jié)1應(yīng)答模式*/
I2C_AcknowledgeConfig(I2C1, ENABLE);
}
/***************************************************
**函數(shù)名:I2C_ReadS
**功能:讀取24C02多個字節(jié)
**注意事項:24C02是256字節(jié),8位地址,A0-A2固定為0,從器件地址為EEPROM_ADDR
***************************************************/
void I2C_ReadS_24C(u8 addr ,u8* pBuffer,u16 no)
{
if(no==0)
return;
while(I2C_GetFlagStatus(I2C1, I2C_FLAG_BUSY));
/*允許1字節(jié)1應(yīng)答模式*/
I2C_AcknowledgeConfig(I2C1, ENABLE);
/* 發(fā)送起始位 */
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));/*EV5,主模式*/
#ifdef AT24C01A
/*發(fā)送器件地址(寫)*/
I2C_Send7bitAddress(I2C1, EEPROM_ADDR, I2C_Direction_Transmitter);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/*發(fā)送地址*/
I2C_SendData(I2C1, addr);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));/*數(shù)據(jù)已發(fā)送*/
/*起始位*/
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
/*器件讀*/
I2C_Send7bitAddress(I2C1, EEPROM_ADDR, I2C_Direction_Receiver);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
#else
/*發(fā)送器件地址(讀)24C01*/
I2C_Send7bitAddress(I2C1, addr<<1, I2C_Direction_Receiver);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
#endif
while (no)
{
if(no==1)
{
I2C_AcknowledgeConfig(I2C1, DISABLE);//最后一位后要關(guān)閉應(yīng)答的
I2C_GenerateSTOP(I2C1, ENABLE);//發(fā)送停止位
}
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_RECEIVED)); /* EV7 */
*pBuffer = I2C_ReceiveData(I2C1);
pBuffer++;
/* Decrement the read bytes counter */
no--;
}
//再次允許應(yīng)答模式
I2C_AcknowledgeConfig(I2C1, ENABLE);
}
/****************************************************
**函數(shù)名:I2C_Standby_24C
**功能:24C是否準(zhǔn)備好再寫入的判斷
**注意事項:本函數(shù)可以理解為:判忙
就是不停發(fā)地址 直到器件有應(yīng)答
****************************************************/
void I2C_Standby_24C(void)
{
vu16 SR1_Tmp;
do
{
/*起始位*/
I2C_GenerateSTART(I2C1, ENABLE);
/*讀SR1*/
SR1_Tmp = I2C_ReadRegister(I2C1, I2C_Register_SR1);
/*器件地址(寫)*/
#ifdef AT24C01A
I2C_Send7bitAddress(I2C1, EEPROM_ADDR, I2C_Direction_Transmitter);
#else
I2C_Send7bitAddress(I2C1, 0, I2C_Direction_Transmitter);
#endif
}while(!(I2C_ReadRegister(I2C1, I2C_Register_SR1) & 0x0002));
/*清除應(yīng)答錯誤標(biāo)志*/
I2C_ClearFlag(I2C1, I2C_FLAG_AF);
/*停止位*/
I2C_GenerateSTOP(I2C1, ENABLE);
}
/*************************************************
**函數(shù)名:I2C_ByteWrite_24C
**功能:寫一個字節(jié)
**注意事項:字寫入同樣需要調(diào)用忙判斷
*************************************************/
void I2C_ByteWrite_24C(u8 addr,u8 dat)
{
/* 起始位 */
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
#ifdef AT24C01A
/* 發(fā)送器件地址(寫)*/
I2C_Send7bitAddress(I2C1, EEPROM_ADDR, I2C_Direction_Transmitter);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/*發(fā)送地址*/
I2C_SendData(I2C1, addr);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
#else
I2C_Send7bitAddress(I2C1, addr<<1, I2C_Direction_Transmitter);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
#endif
/* 寫一個字節(jié)*/
I2C_SendData(I2C1, dat);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/* 停止位*/
I2C_GenerateSTOP(I2C1, ENABLE);
I2C_Standby_24C();
}
/*************************************************
**函數(shù)名:I2C_PageWrite_24C
**功能:寫入一頁(以內(nèi))
**注意事項:此函數(shù)供群寫入調(diào)用
*************************************************/
void I2C_PageWrite_24C(u8 addr,u8* pBuffer, u8 no)
{
while(I2C_GetFlagStatus(I2C1, I2C_FLAG_BUSY));
/*起始位*/
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
#ifdef AT24C01A
/*器件地址(寫)*/
I2C_Send7bitAddress(I2C1, EEPROM_ADDR, I2C_Direction_Transmitter);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/*寫地址值*/
I2C_SendData(I2C1, addr);
while(! I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
#else
I2C_Send7bitAddress(I2C1, addr<<1, I2C_Direction_Transmitter);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
#endif
while(no--)
{
I2C_SendData(I2C1, *pBuffer);
pBuffer++;
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
}
/*停止位*/
I2C_GenerateSTOP(I2C1, ENABLE);
}
/*************************************************
**函數(shù)名:I2C_WriteS_24C
**功能:頁寫入24C
**注意事項:24C02最多允許一次寫入8個字節(jié)
*************************************************/
void I2C_WriteS_24C(u8 addr,u8* pBuffer, u16 no)
{
u8 temp;
//1.先把頁不對齊的部分寫入
temp=addr % I2C_PAGESIZE;
if(temp)
{
temp=I2C_PAGESIZE-temp;
I2C_PageWrite_24C(addr,pBuffer, temp);
no-=temp;
addr+=temp;
pBuffer+=temp;
I2C_Standby_24C();
}
//2.從頁對齊開始寫
while(no)
{
if(no>=I2C_PAGESIZE)
{
I2C_PageWrite_24C(addr,pBuffer, I2C_PAGESIZE);
no-=I2C_PAGESIZE;
addr+=I2C_PAGESIZE;
pBuffer+=I2C_PAGESIZE;
I2C_Standby_24C();
}
else
{
I2C_PageWrite_24C(addr,pBuffer, no);
no=0;
I2C_Standby_24C();
}
}
}
//測試用
void I2C_Test(void)
{
u8 i;
u8 I2c_Buf[128];
I2C_Standby_24C();
//填充緩沖
for(i=0;i<128;i++)
I2c_Buf[i]=i;
//寫
I2C_WriteS_24C(1,I2c_Buf,120);
//清緩沖
for(i=0;i<128;i++)
I2c_Buf[i]=0;
//讀
I2C_ReadS_24C(1,I2c_Buf,80);
for(i=1;i<120;i++)
{
if(I2c_Buf[i]!=i)
{
while(1);
}
}
}
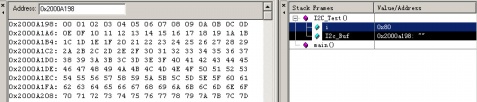
就看這里 確定是否正常~!

其實 都是 while 這種 硬等待 導(dǎo)致屢次調(diào)不通 務(wù)必加入 超時判斷。
簡單的像
i=0;
while((!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED))&&i<12000);i++

評論