STM32 高級定時器-PWM簡單使用

先是配置IO腳:
GPIO_InitTypeDef GPIO_InitStructure;
/* PA8設置為功能腳(PWM) */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*PB13 設置為PWM的反極性輸出*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/*開時鐘PWM的 與GPIO的*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/*配置TIM1*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
voidTim1_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_DeInit(TIM1);//重設為缺省值
/*TIM1時鐘配置*/
TIM_TimeBaseStructure.TIM_Prescaler = 4000;//預分頻(時鐘分頻)72M/4000=18K
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上計數
TIM_TimeBaseStructure.TIM_Period = 144;//裝載值 18k/144=125hz 就是說向上加的144便滿了
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//設置了時鐘分割不懂得不管
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0x0;//周期計數器值 不懂得不管
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//初始化TIMx的時間基數單位
/* Channel 1 Configuration in PWM mode 通道一的PWM*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//正向通道有效 PA8
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;//反向通道也有效PB13
TIM_OCInitStructure.TIM_Pulse = 40; //占空時間 144 中有40的時間為高,互補的輸出正好相反
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //輸出極性
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_Low; //互補端的極性
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;//空閑狀態下的非工作狀態 不管
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;//先不管
TIM_OC1Init(TIM1,&TIM_OCInitStructure); //數初始化外設TIMx通道1這里2.0庫為TIM_OCInit
/* TIM1 counter enable開定時器 */
TIM_Cmd(TIM1,ENABLE);
/* TIM1 Main Output Enable 使能TIM1外設的主輸出*/
TIM_CtrlPWMOutputs(TIM1,ENABLE);
}
//設置捕獲寄存器1
voidSetT1Pwm1(u16 pulse)
{
TIM1->CCR1=pulse;
}
/*操作寄存器改變占空時間*/
/*****************************************************************************************************************
TIM1的定時器通道時間 1到4 分別為 PB8 PA9 PA10 PA11 而互補輸出分別為 PB13 PB14 PB15
中止 PB12 。

如果輸出與互補輸出極性相同的話 就剛好輸出高 互補低 至于PWM模式1 與模式2的區別
在下圖:
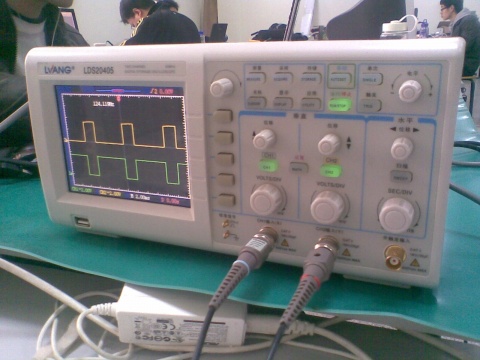
這個是模式1的 了綠為輸出 黃為互補
*************************************************************************************************

上圖是模式2的情況 正好和模式1的反過來了 144中有40 為高 互補的有40為低。
*************************************************************************************************/
//在MAIN 中加點鍵盤掃描啥的 用來改變占空比
/************************************************************
**實驗名稱:PWM
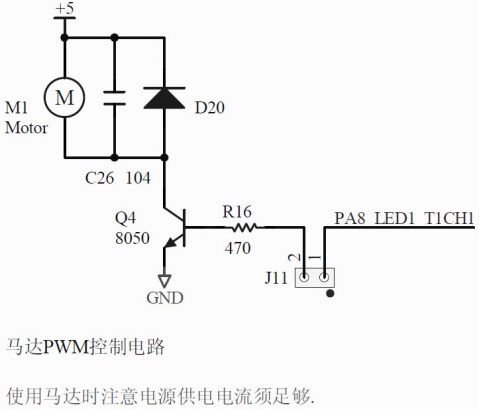
**功能:是PA8產生PWM輸出,PA8為驅動LED1和馬達的IO,
通過UP DOWN鍵,可以改變占空比,從而讓ED1和小馬達的產生變化
**注意事項:LED是低有效,馬達則是高有效,所以LED全滅的時候馬達轉速達到最高.
**作者:電子白菜
*************************************************************/
#include"STM32Lib\stm32f10x.h"
#include"hal.h"
extern voidSetT1Pwm1(u16 pulse);
intmain(void)
{
u16 pulse=40;
ChipHalInit();//片內硬件初始化
ChipOutHalInit();//片外硬件初始化
for(;;)
{
if(GET_UP())
{
while(GET_UP());
if(pulse<=144)
{
pulse+=5;
SetT1Pwm1(pulse);
}
}
if(GET_DOWN())
{
while(GET_DOWN());
if(pulse>30)
{
pulse-=5;
SetT1Pwm1(pulse);
}
}
}
}
/***************************************************************************************/
再來兩張 最小系統板子
/***************************************************************************************/


你也只需一塊這樣板子再來一點時間與干勁這個歷程一樣跑的起來。

評論