AVR 定時器相位修正PWM 模式使用

其他特性和快速PWM基本一至。
本文引用地址:http://www.104case.com/article/201612/325115.htm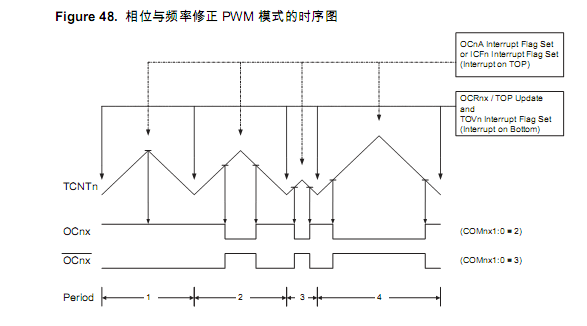
相位修正PWM時序圖

頻率計算公式
參考代碼:
#include
void FreCorrectPWM(void)
{
DDRD_Bit4 = 1;// OC1B 管腳設置為輸出
DDRD_Bit5 = 1;// OC1A 管腳設置為輸出
TCCR1A=(0<
// TCCR1A ==> COM1A1 , COM1A0 , COM1B1 , COM1B0 , FOC1A , FOC1B , WGM11 , WGM10
// 0 1 1 0 無關 無關 1 1
TCCR1B=(1<
// TCCR1B ==> ICNC1 , ICES1 , - , WGM13 , WGM12 , CS12 , CS11 , CS10
// 無關 無關 1 0 0 1 1
OCR1A=1727;// 晶振頻率 11.0592MHz , 設定 100Hz PWM信號 , 64分頻
OCR1B=345;// 為高電平持續時間
}
void main(void)
{
FreCorrectPWM();
}

評論