機器人教程2:舵機及轉向控制原理


圖3舵機外形圖
2、舵機的組成
一般來講,舵機主要由以下幾個部分組成,舵盤、減速齒輪組、位置反饋電位計、直流電機、控制電路等,如圖4、圖5所示。
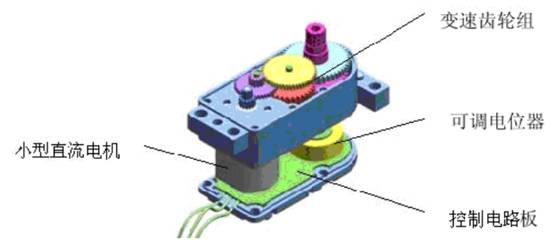
圖4舵機的組成示意圖

圖5舵機組成
舵機的輸入線共有三條,如圖6所示,紅色中間,是電源線,一邊黑色的是地線,這輛根線給舵機提供最基本的能源保證,主要是電機的轉動消耗。電源有兩種規格,一是4.8V,一是6.0V,分別對應不同的轉矩標準,即輸出力矩不同,6.0V對應的要大一些,具體看應用條件;另外一根線是控制信號線,Futaba的一般為白色,JR的一般為桔黃色。另外要注意一點,SANWA的某些型號的舵機引線電源線在邊上而不是中間,需要辨認。但記住紅色為電源,黑色為地線,一般不會搞錯。

圖6舵機的輸出線
3、舵機工作原理
控制電路板接受來自信號線的控制信號,控制電機轉動,電機帶動一系列齒輪組,減速后傳動至輸出舵盤。舵機的輸出軸和位置反饋電位計是相連的,舵盤轉動的同時,帶動位置反饋電位計,電位計將輸出一個電壓信號到控制電路板,進行反饋,然后控制電路板根據所在位置決定電機轉動的方向和速度,從而達到目標停止。其工作流程為:控制信號→控制電路板→電機轉動→齒輪組減速→舵盤轉動→位置反饋電位計→控制電路板反饋。
流,才可發揮舵機應有的性能。
舵機的控制信號周期為20MS的脈寬調制(PWM)信號,其中脈沖寬度從0.5-2.5MS,相對應的舵盤位置為0-180度,呈線性變化。也就是說,給他提供一定的脈寬,它的輸出軸就會保持一定對應角度上,無論外界轉矩怎么改變,直到給它提供一個另外寬度的脈沖信號,它才會改變輸出角度到新的對應位置上如圖7所求。舵機內部有一個基準電路,產生周期為20MS,寬度1.5MS的基準信號,有一個比出較器,將外加信號與基準信號相比較,判斷出方向和大小,從而生產電機的轉動信號。由此可見,舵機是一種位置伺服驅動器,轉動范圍不能超過180度,適用于那些需要不斷變化并可以保持的驅動器中,比如說機器人的關節、飛機的舵面等。

評論