51單片機驅動步進電機__終極(完整版)

這款步進電機的驅動電壓12V,步進角為 7.5度 . 一圈 360 度 , 需要 48 個脈沖完成!!!
該步進電機有6根引線,排列次序如下:1:紅色、2:紅色、3:橙色、4:棕色、5:黃色、6:黑色。
采用51驅動ULN2003的方法進行驅動。
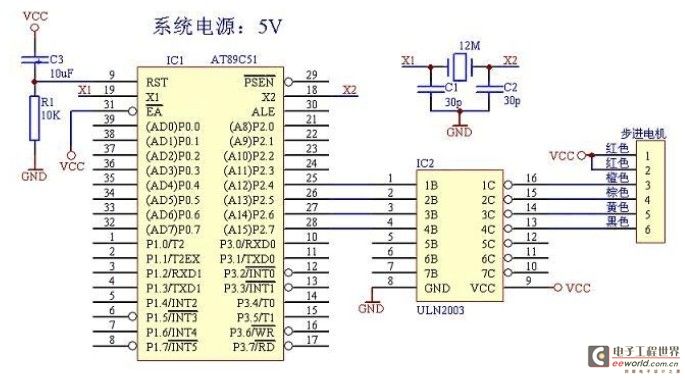
ULN2003的驅動直接用單片機系統的5V電壓,可能力矩不是很大,大家可自行加大驅動電壓到12V。
;******************************************************************************
;************************* 步進電機的驅動*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19
;---------------------------------------------------------------------------------
; 步進電機的驅動信號必須為 脈沖信號!!! 轉動的速度和脈沖的頻率成正比!!!
; 本步進電機步進角為 7.5度 . 一圈 360 度 , 需要 48 個脈沖完成!!!
;---------------------------------------------------------------------------------
; A組線圈對應 P2.4
; B組線圈對應 P2.5
; C組線圈對應 P2.6
; D組線圈對應 P2.7
; 正轉次序: AB組--BC組--CD組--DA組 (即一個脈沖,正轉 7.5 度)
;----------------------------------------------------------------------------------
;----------------------------正轉-------------------------- ORG 0000H LJMP MAIN ORG 0100H
MAIN:
MOV R3,#144 正轉 3 圈共 144 脈沖 START: MOV R0,#00H START1: MOV P2,#00H MOV A,R0
MOV DPTR,#TABLE MOVC A,@A+DPTR
JZ START 對 A 的判斷,當 A = 0 時則轉到 START MOV P2,A
LCALL DELAY INC R0
DJNZ R3,START1
MOV P2,#00H LCALL DELAY1
;-----------------------------反轉------------------------
MOV R3,#144 反轉一圈共 144 個脈沖 START2:
MOV P2,#00H MOV R0,#05 START3: MOV A,R0
MOV DPTR,#TABLE MOVC A,@A+DPTR JZ START2 MOV P2,A CALL DELAY INC R0
DJNZ R3,START3 MOV P2,#00H
LCALL DELAY1 LJMP MAIN
DELAY: MOV R7,#40步進電機的轉速M3: MOV R6,#248 DJNZ R6,$ DJNZ R7,M3
RET
DELAY1: MOV R4,#20 2S 延時子程序 DEL2: MOV R3,#200 DEL3: MOV R2,#250 DJNZ R2,$ DJNZ R3,DEL3 DJNZ R4,DEL2 RET TABLE:
DB 30H,60H,0C0H,90H 正轉表 DB 00 正轉結束
DB 30H,90H,0C0H,60H 反轉表 DB 00 反轉結束 END
51單片機控制四相步進電機
拿 到步進電機,根據以前看書對四相步進電機的了解,我對它進行了初步的測試,就是將5伏電源的正端接上最邊上兩根褐色的線,然后用5伏電源的地線分別和另外 四根線(紅、蘭、白、橙)依次接觸,發現每接觸一下,步進電機便轉動一個角度,來回五次,電機剛好轉一圈,說明此步進電機的步進角度為 360/(4×5)=18度。地線與四線接觸的順序相反,電機的轉向也相反。
此步進電機,則只需分別依次給四線一定時間的脈沖電流,電機便可連續轉動起來。
通過改變脈沖電流的時間間隔,就可以實現對轉速的控制;通過改變給四線脈沖電流的順序,則可實現對轉向的控制。所以,設計了如下電路圖:
C51程序代碼為: 代碼一
#include static unsigned int count; static unsigned int endcount; void delay(); void main(void) {
count = 0; P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 0;
EA = 1; //允許CPU中斷
TMOD = 0x11; //設定時器0和1為16位模式1
ET0 = 1; //定時器0中斷允許 TH0 = 0xFC;
TL0 = 0x18; //設定時每隔1ms中斷一次 TR0 = 1; //開始計數 startrun: P1_3 = 0; P1_0 = 1; delay();
P1_0 = 0;
P1_1 = 1; delay(); P1_1 = 0; P1_2 = 1; delay(); P1_2 = 0; P1_3 = 1; delay();
goto startrun; }
//定時器0中斷處理
void timeint(void) interrupt 1 {
TH0=0xFC;
TL0=0x18; //設定時每隔1ms中斷一次 count++; }
void delay()
{
endcount=2; count=0;
do{}while(count
主站蜘蛛池模板:
隆化县|
乌海市|
勃利县|
黄平县|
兴业县|
陇西县|
定西市|
大厂|
南昌市|
揭西县|
马山县|
西乌|
耿马|
石景山区|
滨海县|
友谊县|
民权县|
全南县|
左权县|
恭城|
淮滨县|
枣强县|
怀柔区|
海丰县|
盐城市|
临夏县|
顺昌县|
巴青县|
上杭县|
若尔盖县|
鄢陵县|
耿马|
黑河市|
内乡县|
南部县|
乌鲁木齐市|
宣恩县|
佛山市|
雷波县|
澄城县|
庆城县|

關鍵詞:
51單片機步進電
評論