51單片機(jī)學(xué)習(xí)之3-步進(jìn)電機(jī)

講解用移位和或運(yùn)算實(shí)現(xiàn)流水燈的方法《51單片機(jī)復(fù)習(xí)筆記2》里面的代碼。
本文引用地址:http://www.104case.com/article/201611/323866.htm講解了用函數(shù)的方法實(shí)現(xiàn)流水燈。
第九集
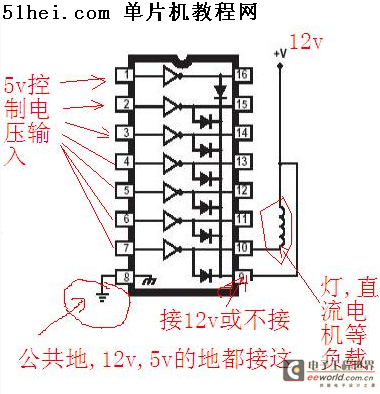
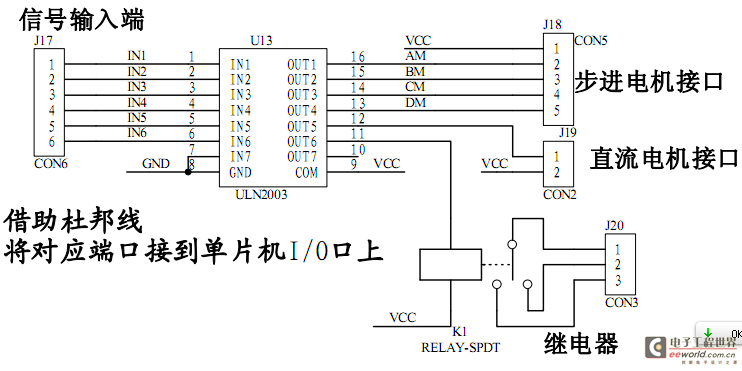
一、ULN2003芯片。
用于增強(qiáng)單片機(jī)IO口的驅(qū)動能力。
ULN2003是高耐壓、大電流達(dá)林頓陳列,由七個(gè)硅NPN達(dá)林頓管組成。
ULN2003是大電流驅(qū)動陣列,多用于單片機(jī)、智能儀表、PLC、數(shù)字量輸出卡等控制電路中。可直接驅(qū)動繼電器等負(fù)載。
ULN2003的每一對達(dá)林頓都串聯(lián)一個(gè)2.7K的基極電阻,在5V的工作電壓下它能與TTL和CMOS電路
直接相連,可以直接處理原先需要標(biāo)準(zhǔn)邏輯緩沖器來處理的數(shù)據(jù)。
ULN2003工作電壓高,工作電流大,灌電流可達(dá)500mA,并且能夠在關(guān)態(tài)時(shí)承受50V-95V的電壓,輸出還可以在高負(fù)載電流并行運(yùn)行。ULN2003采用DIP—16或SOP—16塑料封裝。
一、蜂鳴器
驅(qū)動蜂鳴器很簡單,由于51單片機(jī)的IO口驅(qū)動能力還不足以驅(qū)動蜂鳴器,所以需要加一個(gè)三極管來做電子開關(guān)控制蜂鳴器。(當(dāng)然也可以用ULN2003)。上面電路圖中其實(shí)不接電阻也可以驅(qū)動蜂鳴器,當(dāng)然R26的分支需要去掉。FM接在單片機(jī)的P2^3IO口上并給低電平即可讓蜂鳴器鳴響。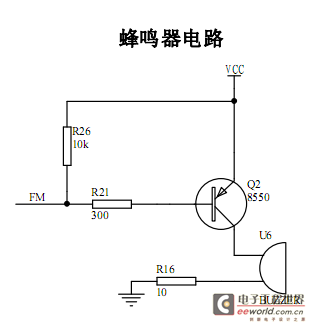
第十集
一、步進(jìn)電機(jī)
步進(jìn)電機(jī)和我們以前玩的四驅(qū)車?yán)锩娴鸟R達(dá)是不一樣的。里面的馬達(dá)是連續(xù)旋轉(zhuǎn)的,而步進(jìn)電機(jī)卻是一步一步地轉(zhuǎn)動,準(zhǔn)確來說是每次只轉(zhuǎn)動一個(gè)很小的角度,用手也是轉(zhuǎn)不動的。
對于角位移步進(jìn)電機(jī)可以通過控制脈沖的個(gè)數(shù)來控制角位移量(即幾個(gè)脈沖就轉(zhuǎn)動幾個(gè)步距角),達(dá)到準(zhǔn)確定位的目的。可以通過控制脈沖的頻率來控制步進(jìn)電動機(jī)的轉(zhuǎn)動速度和加速度達(dá)到調(diào)速的功能。
步進(jìn)電機(jī)按相數(shù)分可分為:單相、雙相和多相三種。
步進(jìn)電機(jī)的工作原理:(這里是3相步進(jìn)電機(jī))里面的1,2,3,4是轉(zhuǎn)子,外面的A、A1、B、B1、C、C1是定子。
1相勵磁方式: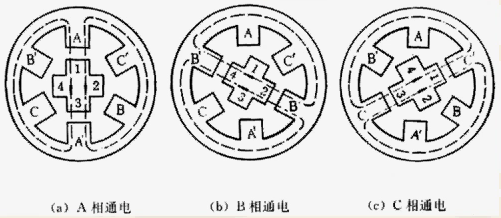
當(dāng)A相通電時(shí),產(chǎn)生A-A1軸線方向的磁通,并通過轉(zhuǎn)子形成閉合回路。這時(shí)候A、A1就成了電磁鐵的N、S極。在磁場的作用下,轉(zhuǎn)子總是力圖轉(zhuǎn)到磁阻最小的位置,也就是要轉(zhuǎn)到轉(zhuǎn)子的齒對齊A、A1極的位置,也就是說轉(zhuǎn)子的1、3會對著定子的A、A1(圖a);
緊接著B相通電(A、C兩相不通電),轉(zhuǎn)子就會向順時(shí)針方向轉(zhuǎn)4、2對齊到定子的B1、B(圖b)
緊接著C相通電(A、B兩相不通電),轉(zhuǎn)子就會向順時(shí)針方向轉(zhuǎn)1、3對齊到定子的C1、C(圖c)
當(dāng)一直重復(fù)著上面的步驟A→B→C那么轉(zhuǎn)子就會一直順時(shí)針方向轉(zhuǎn)動。每轉(zhuǎn)動一次都只是轉(zhuǎn)動一個(gè)固定的角度,也就是步距角。。當(dāng)重復(fù)的速度越快,那么轉(zhuǎn)動的速度也就越快。
這種通電方式是1相勵磁方式。
1-2相勵磁方式:
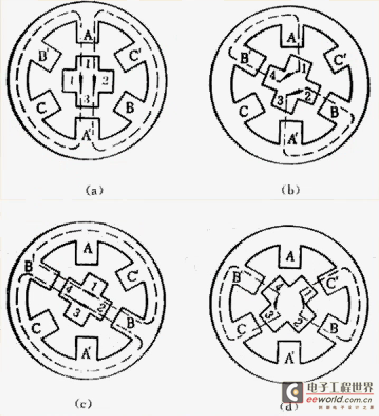
設(shè)A相先通電,轉(zhuǎn)子就會向順時(shí)針方向轉(zhuǎn)1、3對齊到定子的A、A1(圖a)
接著在A相通電的情況下,繼續(xù)給B相通電。這時(shí)B、B1極對轉(zhuǎn)子2、4產(chǎn)生磁力,但是A,A1繼續(xù)拉住1、3,因此轉(zhuǎn)子會轉(zhuǎn)到兩個(gè)磁拉力平衡為止(如圖b),從外看來,轉(zhuǎn)子順時(shí)針轉(zhuǎn)動了一個(gè)很小的角度。
接著A相斷電,B相繼續(xù)通電。這時(shí)轉(zhuǎn)子順時(shí)針轉(zhuǎn)動2、4和定子B、B1極對齊(如圖c)。
接著B相通電的情況下,給C相通電。這時(shí)C、C1極對轉(zhuǎn)子3、1產(chǎn)生磁力,而B、B1會繼續(xù)拉住2、4,因此轉(zhuǎn)子會順時(shí)針轉(zhuǎn)動一個(gè)小角度(如圖d)。
一直重復(fù)以上步驟A→A、B→B→B、C→C→C、A→A.....,一樣可以讓步進(jìn)電機(jī)轉(zhuǎn)動起來,其中每一個(gè)步驟通電都會讓步進(jìn)電機(jī)轉(zhuǎn)動一個(gè)角度,這個(gè)角度是1相勵磁方式角度的一半(1/2),這就是稱為最小步距角。

評論