基于Boa-web服務器的遠程機器人控制(網絡篇)

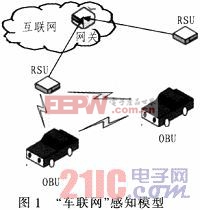
Linux的web服務器有Hapd、Thttpd和Boa,其中Boa服務器源代碼開放、性能優秀、支持CGI通用網關接口技術,比較適合做web開發。Boa服務器可以通過CGI與外部應用程序和腳本之間進行交互,根據客戶端瀏覽器在請求時所采用的方法,服務器會搜集客戶所提供的信息,并將該部分信息發送給指定的CGI擴展程序,CGI擴展程序進行信息處理并將結果返回給服務器,然后服務器對信息進行分析,并將結果發送回客戶端在瀏覽器上顯示出來。其實這就是B/S(瀏覽器/服務器)模式,可以用下圖來表示
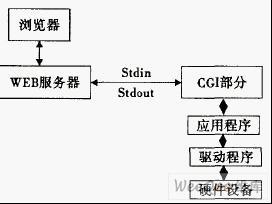
這個模式將是本次基于Boa-web服務器的遠程機器人控制開發的主要模式,下面是對這個模式的說明!!!
如圖:
1、瀏覽器可以是windows下的瀏覽器,也可以是手機上的瀏覽器,控制端只是一個html網頁而已。
2、Web服務器就是linux下的Boa服務器。基于Boa服務器,可以建立一個動態的網站,通過這個網站可以進行嵌入式設備和用戶的之間進行信息交互。
3、CGI部分。CGI是一種腳本語言,可以和perl,PHP,C語言一起用,為了方便動態網站的搭建,本次開發主要以PHP+CGI為主。
4、應用程序部分。其實在本次開發中,應用程序就是一個個CGI程序。這個一個個CGI程序處理由用戶通過Boa服務器傳遞過來的信息,然后通過硬件的驅動程序調用開發板的硬件設備。
二、Boa和tftp服務器的搭建
BOA服務器是要運行于ARM嵌入式設備上的,因此需要對BOA源文件進行交叉編譯。編譯工具使用arm-linux-gcc-4.3.2交叉編譯工具鏈,拷貝文件arm-lin-ux-gcc-4.3.2.tgz到目錄/tmp下,執行命令cd/tmp;tarzxvfarm-linux-gcc- 4.3.2.tgz-C/.這樣交叉編澤工具就安裝到/usr/local/arm/4.3.2目錄下面。為確保在打開終端后能直接應用交叉編譯工具鏈,要在/root/.bashrc文件中把編譯器路徑加入到系統環境變量。運行命令gedit/root/.bashrc編輯文件/root/.bashrc。在文件的最后添加exportPATH=$PATH:/usr/local/arm/4.3.2/bin。保存退出。接著執行source/root/.bashrc命令使設置生效。最后檢測交叉編譯工具是否安裝成功,命令為在終端中輸入arm-linux-gcc-v;若能在輸出的信息中看到arm-linux-gcc版本號4.3.2,說明安裝成功。
其次,交叉編譯BOA源碼,拷貝BOA源碼包boa-0.94.13.tar.gz到/tmp目錄下,解壓縮掩碼包tarzxvfboa- 0.94.13.tar.gz;解壓后在Linux終端進入BOA所在目錄,首先執行命令./con-figure生成Makefile文件,然后打開文件夾,找到Makefile文件,用文本編輯器打開,找到CC=gcc,CPP=gcc-E兩行,分別將其設置成上一步生成的交叉編譯工具路徑 CC=/usr/local/arm/4.3.2/bin/arm-linux-gcc和 CPP=/usr/local/arm/4.3.2/bin/arm-linux-gcc-E,然后將Makefile保存后退出,回到終端執行make 命令,進行交叉編譯得到可執行程序BOA,它就是能夠運行在arm嵌入式設備上的執行文件。可通過命令fileboa查看文件信息。拷貝此BOA文件到目標板/bin目錄中。
再次,配置boa服務器。配置BOA主要是為了使其能夠支持CGI程序的執行。在文件系統的/etc目錄下mkdirboa建立一個BOA目錄,拷貝 BOA源碼目錄中的boa.conf文件到文件系統目錄/etc/boa目錄下,然后根據嵌入式BOA的需求在此配置文件的基礎上進行修改。在修改此配置文件時需要注意保證其他文件和設置必須與配置文件相一致,否則嵌入式Web服務器BOA就不能正常運行。
搭建Boa服務器完成后,可以在linux文件管理中的根目錄會出現www文件夾,這個文件夾就是前面提到的動態網站系統的存放目錄。如果要對這個網站系統的文件進行讀寫,這時候就要用到tftp服務器了,通過tftp服務,我們可以輕松的對文件夾www中的動態網站系統的文件進行讀寫。關于搭建tftp服務器的搭建在這里就不做介紹了。
三、Boa服務器移植測試
從tiny6410的硬件資源可以看到,開發板提供了四個LED,我們簡單地編個程序來測試一下通過Boa服務器遠程控制開發板上的LED。
程序如下:
<inputtype=“radio”name=“speed”value=“show”checked>慢速
<inputtype=“radio”name=“speed”value=“normal”>中速
<inputtype=“radio”name=“speed”value=“rast”>高速
<inputtype=“submit”value=確定“name=”submit>
其中leds.cgi程序如下:
#!/bin/sh
Period=1+case$QUERY-STRINGin
*slow*)
period=0.25
;;
*normal*)
period=0.125
;;
*fast*
period=0.0625+;;
*fast*)+period=0.0626
;;
esac
/bin/echo$period?/tmp/led-control//通過Query_String的環境變量傳遞給應用程序。
echo“Content-type:texe/html;charset=gb2312”
echo
/bin/catled=result.template
exit0
其中led-control是編譯好的可執行的應用程序,通過led驅動來實現對LED的控制。這些硬件資料可以在友善之臂提供PDF文件中會有介紹,如果用到開發板的其他的硬件設備可以查閱相關數據后進行對其他硬件設備的調用。
接著,假設開發板的IP為192.198.1.230,那么直接訪問http://192.198.1.230就可以訪問Boa服務器的網頁了,通過這個網頁可以控制開發板上LED的閃爍速度。這次測試暫時就不上圖了,想看的話可以到我寢室來,嘿嘿。
結束語

評論