基于msp430的溫控系統

第一個是PID算法的改進,由于溫度控制是一個只能加熱不能制冷的控制,所以我們只用了PI。首先通過P讓溫度加到一個離設定溫度較近的溫度,然后利用I逼近設定溫度。
本文引用地址:http://www.104case.com/article/201611/322848.htm程序如下:
void
{
e1=set_t-now_t;
uk=kp*e1+ki*e2+kd*e3;
//
e2=e1+e2;
e3=e1-e4;
e4=e1;
if(uk>speed)
uk=speed;
if(uk<0)
uk=0;
control_value=1-uk;
}
第二個是時間控制的線性算法
在時間控制中要求溫度從40°均勻加熱到60°,并且時間任意可設。
本程序實現的方法是:設定時間set_time是以s為單位,把40°到60°的這20°溫差平均分成set_time份。然后在控制周期中,每一個周期讓時間段time_m自加1,然后根據平均的公式算出該時間段應該達到的溫度,公式如下:

因為控制時間輸入set_time是以s為單位,而控制周期是100ms,所以上面要除以10。
具體的實現代碼如下:
control_m_value=(float)time_m/set_time;
control_m_value=control_m_value/10;
control_m_value=40+20*control_m_value;
set_t=control_m_value;
pid();
CCR1=control_value*12000;
(1)傳感器信號的采集、處理
(2)加熱絲的PWM輸出
(3)加熱的溫度和速度控制
(4)溫控系統運行流程控制:程序初始化、溫控的啟動與結束、液晶顯示模塊控制
(5)溫控信息顯示與參數設定:狀態顯示、控制算法參數設定等
上面的幾個能中,除了程序的初始化在主函數中執行,其他的各個部分都是在中斷函數中執行的,其中鍵盤檢測和數據輸入是在鍵盤中斷中執行,其他的數據采集、處理、控制等都是在定時器5ms中斷中執行的。單片機平時處于低功耗模式,降低功耗。
程序的流程圖如下:
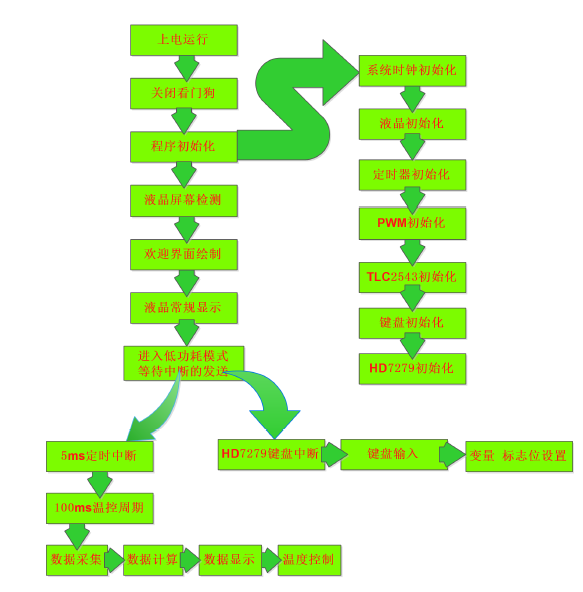
圖5
5、測試方法描述:(含模塊與系統測試方法)
測試數據表格如下表1
V(參) | |||
4.2V | 4V | 3.8V | |
V+ | 117.20mv | 86.09mv | 81.45mv |
V- | 90.12mv | 111.84mv | 106.23mv |
ΔV | 26.98mv | 25.62mv | 24.9mv |
Vo | 3.872v | 3.682v | 3.573v |
(1)計算公式如下: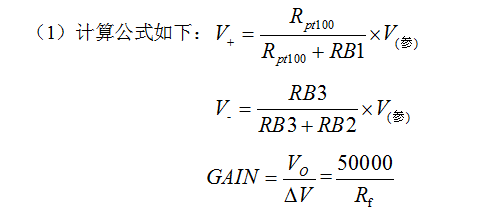

評論