微型四旋翼飛行器的設計與制作

硬件設計:
總體思路:
硬件模塊:
硬件選型:
模塊名稱 | 元件名稱 | 數量 | |
單片機 | STM32F103CBT6 | 1 | |
慣性測量模塊(IMU) | MPU6050(三軸加速度計+三軸陀螺儀) | 1 | |
無線通訊模塊 | NRF24L01 | 1 | |
電機驅動模塊 | AO3400 5.8A | 4 | |
續流二極管 | SS34 3A | 4 | |
電源管理模塊 | 穩壓 | TPS79333 3.3V | 1 |
充放電 | TP4057 USB兼容5V充電 | 1 | |
直流有刷電機 | 空心杯有刷直流電機7*16mm | 4 | |
大電流放電電池 | 250mAh 20C | 1 | |
遙控器 | JOYPAD游戲手柄 | 1 | |
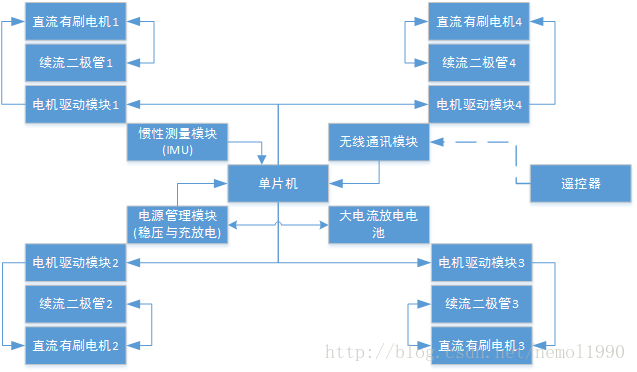
硬件工作綜述:
硬件設計功能模塊圖:
實際效果圖與相關參數:

尺寸:對角電機軸距10x10cm
重量:33.2g(帶電池)
軟件設計:
總體思路:
姿態解算:
以下給出筆者姿態融合的代碼,該代碼網上都有,筆者在這里做了些許注釋,方便理解。

- void
IMUupdata(float gx, float gy, float gz, float ax, float ay, float az) - {
float recipNorm; //平方根的倒數 float halfvx, halfvy, halfvz; //在當前載體坐標系中,重力分量在三個軸上的分量 float halfex, halfey, halfez; //當前加速度計測得的重力加速度在三個軸上的分量與當前姿態在三個軸上的重力分量的誤差,這里采用差積的方式 float qa, qb, qc; gx = gx * PI / 180; //轉換為弧度制 gy = gy * PI / 180; gz = gz * PI / 180; //如果加速度計處于自由落體狀態,可能會出現這種情況,不進行姿態解算,因為會產生分母無窮大的情況 if(!((ax == 0.0f) && (ay == 0.0f) && (az == 0.0f))) { //單位化加速度計,意義在于在變更了加速度計的量程之后不需要修改Kp參數,因為這里歸一化了 recipNorm = invSqrt(ax * ax + ay * ay + az * az); ax *= recipNorm; ay *= recipNorm; az *= recipNorm; //將當前姿態的重力在三個軸上的分量分離出來 //就是方向余弦旋轉矩陣的第三列,注意是地理坐標系(n系)到載體坐標系(b系)的,不要弄反了.如果書上是b系到n系,轉置即可 //慣性測量器件測量的都是關于b系的值,為了方便,我們一般將b系轉換到n系進行導航參數求解。但是這里并不需要這樣做,因為這里是對陀螺儀進行補償 halfvx = g_q1 * g_q3 - g_q0 * g_q2; halfvy = g_q0 * g_q1 + g_q2 * g_q3; halfvz = g_q0 * g_q0 - 0.5f + g_q3 * g_q3; //計算由當前姿態的重力在三個軸上的分量與加速度計測得的重力在三個軸上的分量的差,這里采用三維空間的差積(向量積)方法求差 //計算公式由矩陣運算推導而來 公式參見http://en.wikipedia.org/wiki/Cross_product 中的Mnemonic部分 halfex = (ay * halfvz - az * halfvy); halfey = (az * halfvx - ax * halfvz); halfez = (ax * halfvy - ay * halfvx); //積分求誤差,關于當前姿態分離出的重力分量與當前加速度計測得的重力分量的差值進行積分消除誤差 if(g_twoKi > 0.0f) { g_integralFBx += g_twoKi * halfex * CNTLCYCLE; //Ki積分 g_integralFBy += g_twoKi * halfey * CNTLCYCLE; g_integralFBz += g_twoKi * halfez * CNTLCYCLE; gx += g_integralFBx; //將積分誤差反饋到陀螺儀上,修正陀螺儀的值 gy += g_integralFBy; gz += g_integralFBz; } else //不進行積分運算,只進行比例調節 { g_integralFBx = 0.0f; g_integralFBy = 0.0f; g_integralFBz = 0.0f; } //直接應用比例調節,修正陀螺儀的值 gx += g_twoKp * halfex; gy += g_twoKp * halfey; gz += g_twoKp * halfez; } //以下為四元數微分方程.將陀螺儀和四元數結合起來,是姿態更新的核心算子 //計算方法由矩陣運算推導而來 // . 1 // q = - * q x Omega 式中左邊是四元數的倒數,右邊的x是四元數乘法,Omega是陀螺儀的值(即角速度) // 2 // . // [q0] [0 -wx -wy -wz] [q0] // . // [q1] [wx 0 wz -wy] [q1] // . = * // [q2] [wy -wz 0 wx ] [q2] // . // [q3] [wz wy -wx 0 ] [q3] gx *= (0.5f * CNTLCYCLE); gy *= (0.5f * CNTLCYCLE); gz *= (0.5f * CNTLCYCLE); qa = g_q0; qb = g_q1; qc = g_q2; g_q0 += (-qb * gx - qc * gy - g_q3 * gz); g_q1 += ( qa * gx + qc * gz - g_q3 * gy); g_q2 += ( qa * gy - qb * gz + g_q3 * gx); g_q3 += ( qa * gz + qb * gy - qc * gx); //單位化四元數,意義在于單位化四元數在空間旋轉時是不會拉伸的,僅有旋轉角度.這類似與線性代數里面的正交變換 recipNorm = invSqrt(g_q0 * g_q0 + g_q1 * g_q1 + g_q2 * g_q2 + g_q3 * g_q3); g_q0 *= recipNorm; g_q1 *= recipNorm; g_q2 *= recipNorm; g_q3 *= recipNorm; //四元數到歐拉角轉換,轉換順序為Z-Y-X,參見.pdf一文,P24 //注意此時的轉換順序是1-2-3,即X-Y-Z。但是由于畫圖方便,作者這里做了一個轉換,即調換Z和X,所以順序沒變 g_Yaw = atan2(2 * g_q1 * g_q2 + 2 * g_q0 * g_q3, g_q1 * g_q1 + g_q0 * g_q0 - g_q3 * g_q3 - g_q2 * g_q2) * 180 / PI; //Yaw g_Roll = asin(-2 * g_q1 * g_q3 + 2 * g_q0* g_q2) * 180 / PI; //Roll g_Pitch = atan2(2 * g_q2 * g_q3 + 2 * g_q0 * g_q1, -2 * g_q1 * g_q1 - 2 * g_q2* g_q2 + 1) * 180 / PI; //Pitch - }

評論