ARM工作模式

Arm體系結構將存儲器看做是從零地址開始的字節的線性組合。從零字節到三字節放置第一個存儲的字(32位)數據,從第四個字節到第七個字節放置第二個存儲的字數據,一次排列。作為32位的微處理器,arm體系結構所支持的最大尋址空間為4GB。
本文引用地址:http://www.104case.com/article/201611/322376.htm存儲器格式
指令長度:
Arm微處理器的指令長度是32位的,也可以為16位(thumb狀態下)。Arm微處理器中支持字節(8位),半字(16位),字(32位)三種數據類型,其中,字需要4字節對齊,半字需要2字節對齊。
注:所謂的指令長度是一條完整的指令的長度,而不是單純的mov這3個字母長度
二、ARM體系的CPU有兩種工作狀態
1、ARM狀態:處理器執行32位的字對齊的ARM指令;
在程序運行的過程中,可以在兩種狀態之間進行相應的轉換。處理器工作狀態的轉變并不影響處理器的工作模式和相應寄存器中的內容。
CPU上電處于ARM狀態
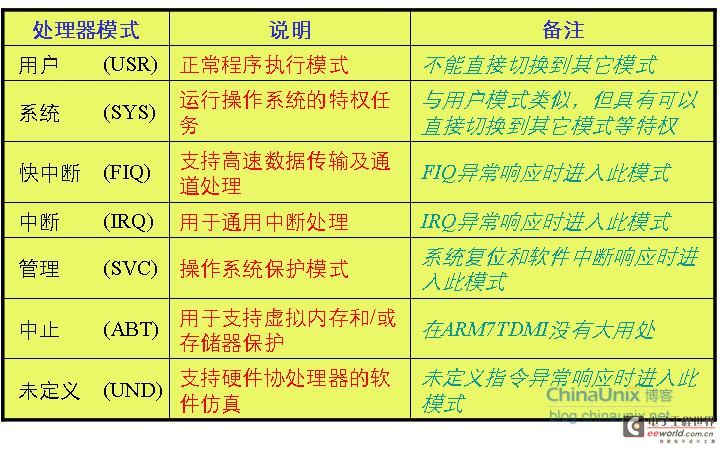
三、ARM體系的CPU有以下7種工作模式:
Arm的工作模式切換有兩種方法:
被動切換:在arm運行的時候產生一些異常或者中斷來自動進行模式切換
主動切換:通過軟件改變,即軟件設置寄存器來經行arm的模式切換,應為arm的工作模式都是可以通過相應寄存器的賦值來切換的。
Tips:當處理器運行在用戶模式下,某些被保護的系統資源是不能被訪問的。
除用戶模式外,其余6種工作模式都屬于特權模式;
特權模式中除了系統模式以外的其余5種模式稱為異常模式;
大多數程序運行于用戶模式;
進入特權模式是為了處理中斷、異常、或者訪問被保護的系統資源;
四、寄存器
ARM有31個通用的32位寄存器,6個程序狀態寄存器,共分為7組,有些寄存器是所有工作模式共用的,還有一些寄存器專屬于每一種工作模式;
R13——棧指針寄存器,用于保存堆棧指針;
R14——程序連接寄存器,當執行BL子程序調用指令時,R14中得到R15的備份,而當發生中斷或異常時,R14保存R15的返回值;
R15——程序計數器;
快速中斷模式有7個備份寄存器R8—R14,這使得進入快速中斷模式執行很大部分程序時,甚至不需要保存任何寄存器;
其它特權模式都含有兩個獨立的寄存器副本R13、R14,這樣可以令每個模式都擁有自己的堆棧指針和連接寄存器;
五、當前程序狀態寄存器(CPSR)
CPSR中各位意義如下:
T位:1——CPU處于Thumb狀態, 0——CPU處于ARM狀態;
I、F(中斷禁止位): 1——禁止中斷, 0——中斷使能;
工作模式位:可以改變這些位,進行模式切換;
六、程序狀態保存寄存器(SPSR)
當切換進入某一個特權模式時,SPSR保存前一個工作模式的CPSR值,這樣,當返回前一個工作模式時,可以將SPSR的值恢復到CPSR中;
七、模式切換
當異常發生,CPU進入相應的異常模式時,以下工作是由CPU自動完成的:
1、在異常模式的R14中保存前一工作模式的下一條即將執行的指令地址;
2、將CPSR的值復制到異常模式的SPSR中;
3、將CPSR的工作模式設為該異常模式對應的工作模式;
4、令PC值等于這個異常模式在異常向量表中的地址,即跳轉去執行異常向量表中的相應指令;
從異常工作模式退回到之前的工作模式時,需要由軟件來完成以下工作:
1、將異常模式的R14減去一個適當的值(4或8)后賦給PC寄存器;
2、將異常模式SPSR的值賦給CPSR;

評論