基于C51單片機的遙控小車設計與制版

1、熟悉用Proteus繪制原理圖的過程;
本文引用地址:http://www.104case.com/article/201611/322114.htm2、利用Proteus進行電路仿真
3、熟悉PCB制版的過程;
4、學會封裝的制作;
5、學會自動、手動布局、布線;
二、
此次試驗采用基于C51單片機的遙控小車的設計。以 89C51 單片機為控制核心,采用 L298N 對小車電機的控制,利用以 PT2262/PT2272 芯片為模塊的無線遙控裝置,實現小車的前進、后退、左轉、右轉。
整個系統的構成是由兩部分組成。 一部分是硬件系統, 一 部分是軟件系統(見附錄1)。
硬件方案確定如下:在現有電動車模型的基礎上,加裝無線控制模塊,電機驅動模塊,實現對電動車的無線遙控,并將數據傳送至單片機進行處理,然后由單片機根據所接收到檢測的數據實現對電動車的控制。
三、單片機簡介
1、89c51硬件結構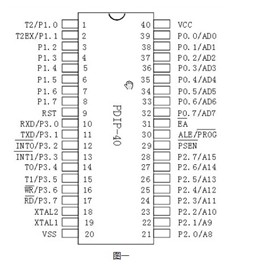
89C51(引腳圖如圖一)是一種帶4K字節閃爍可編程可擦除只讀存儲器的低電壓、高性能CMOS8位微處理器,俗稱單片機。單片機的可擦除只讀存儲器可以反復擦除100次。該器件采用ATMEL高密度非易失存儲器制造技術制造,與工業標準的MCS-51指令集和輸出管腳相兼容。
1.1、存儲器
89C51 片內有 ROM(程序存儲器,只能讀)和 RAM(數據存儲器,可讀可寫) 兩類, 他們有各自獨立的存儲地址空間, 與一般微機的存儲器配置方式很不相同。
1、程序存儲器(ROM) 存放程序,一些原始數據和表格。89C51 及 8751 的片內程序存儲器容量為 4KB,地址從 0000H 開始,用于存放程序和表格常數。
2、數據存儲器(RAM) 存放可以讀/寫的數據---運算的中間結果、最終結果、欲顯示的數據等。
3. 特殊功能寄存器 89C51 單片機內部還有 SP,DPTR,PCON,…,IE,IP 等特殊功能寄存器,它 們也同 128 字節 RAM 在一個隊列編址,地址為 80H~FFH。在這 128 字節 RAM 單元 中有 21 個特殊功能寄存器(SFR) ,在這些特殊功能寄存器中還包括 P0~P3 口鎖存器。
1.2、I/O接口
四個8位并行I/O接口 P0-P3。每個口既可以用作輸入,也可以用作輸出。它們都是雙向端口,每個端口有8條I/O 線,均可輸入/輸出。P0-P3 口四個鎖 存器同 RAM 統一編址,可以把 I/O 口當作一般特殊功能寄存器來尋址。一個全雙工UART(通用異步接收發送器)的串行I/O 口。用于實現單片機之間或單片機與微機之間的串行通信。
1.3、定時器/計數器
1.4、五個中斷源的中斷控制系統
1.5、振蕩器及定時電路
1.6、復位電路
單片機在啟動時都需要復位,以使CPU及系統各部件處于確定的初始狀態,并從初態開始工作。89系列單片機的復位信號是從RST引腳輸入到芯片內的施密特觸發器中的。當系統處于正常工作狀態時,且振蕩器穩定后,如果RST引腳上有一個高電平并維持2個機器周期(24個振蕩周期)以上,則CPU就可以響應并將系統復位。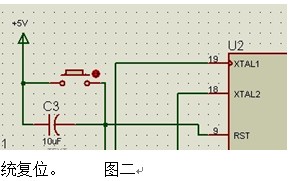
手動按鈕(圖二)復位需要人為在復位輸入端RST上加入高電平,一般采用的辦法是在RST端和正電源Vcc之間接一個按鈕。當人為按下按鈕時,則Vcc的+5V電平就會直接加到RST端。手動按鈕復位的電路如所示。由于人的動作再快也會使按鈕保持接通達數十毫秒,所以,完全能夠滿足復位的時間要求。
1.7、單片機最小系統:
單片機最小系統(圖三)是由復位電路和晶振電路組成的,它是單片機實現工作的最小系統。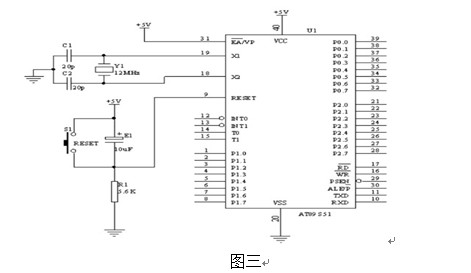
圖三
2、系統運動控制部分設計
2.1、電機選型
電機種類繁多,本設計采用比較常見的兩種電機進行比較。
1、直流電動機是依靠直流工作電壓運行的電動機,直流電動機具有調速性能好、 起動容易、能夠載重起動等優點,所以目前直流電動機的應用仍然很廣泛,尤其 在可控硅直流電源出現以后。
2、步進電動機 步進電動機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超 載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。步進電 動機主要應用在數控機床制造領域,由于步進電動機不需要 A/D轉換,能夠直接將數字脈沖信號轉化成為角位移,所以一直被認為是最理想的數控機床執行元件。
綜合本設計的要求,采用價格較便宜的直流電動機。
2.2、L298N驅動電機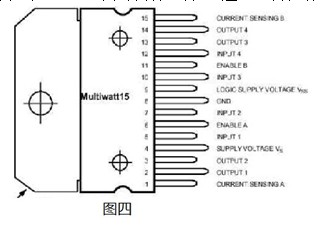
可以方便的 驅動兩個直流電機,或一個兩相步進電機。L298N 芯片可以驅動兩個二相電機,也可以驅動一個四相電機,輸出電壓最高可達 50V,可以直接通過電源來調節輸 出電壓;可以直接用單片機的IO口提供信號;而且電路簡單,使用比較方便。 L298N 可接受標準 TTL 邏輯電平信號 VSS,VSS 可接 4.5~7 V 電壓。4 腳 VS 接電源電壓,VS電壓范圍VIH為+2.5~46 V。輸出電流可達2.5 A,可驅動電感性負載。1腳和15腳下管的發射極分別單獨引出以便接入電流采樣電阻,形成電流傳感信號。L298可驅動2個電動機,OUT1,OUT2 和 OUT3,OUT4之間可分別接電動機,本實驗裝置我們選用驅動一臺電動機。5,7,10,12 腳接輸入控制電平,控制電機的正反轉。ena、enb接控制使能端,控制電機的停轉。圖五是 L298N 功能邏輯圖。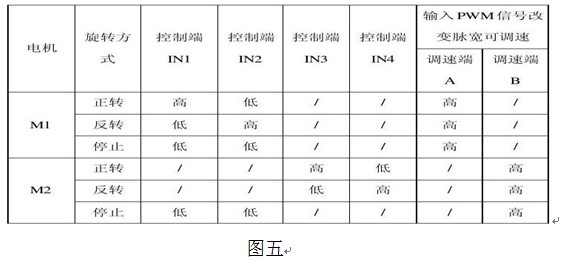
圖五
3、無線收發模塊PT2262/PT2272
設計采用輔助模塊,由于無線電的設計涉及的學科知識面比較廣,調頻比 較困難。故此本設計直接應用市場上的成品無線電模塊,本設計采用的是市面上常見的 PT2262/2272 無線模塊如圖六。 PT2262/2272 是臺灣普城公司生產的一種 CMOS 工藝制造的低功耗低價位通 用編解碼電路(目前也有國產的代用產品產品如 SC***,HS***等) ,PT2262/2272 最多可有 12 位(A0-A11)三態地址端管腳(懸空,接高電平,接低電平),任意組合可提供 531441地址碼,PT2262最多可有6位(D0-D5)數據端管腳,設定的地址碼和數據碼從17腳串行輸出,可用于無線遙控發射電路。 編碼芯片PT2262發出的編碼信號由:地址碼、數據碼、同步碼組成一個完整的碼字,解碼芯片 PT2272 接收到信號后其
圖六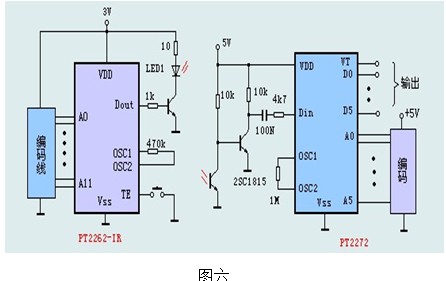
本設計采用四路的PT2262/PT2272集成模塊,接收模塊PT2272的輸出端
4、總原理圖:
根據以上分析連接完電路原理仿真圖如圖七: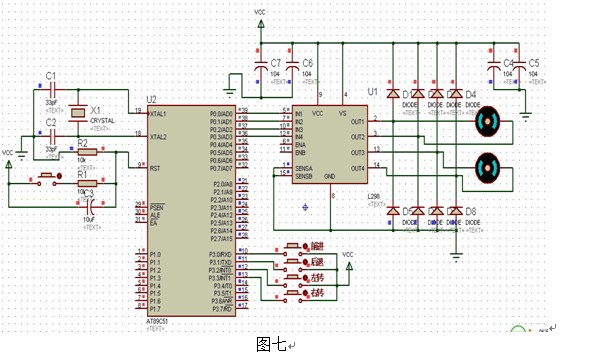
圖七
三、
見附錄1
四、PCB制作
4.1、導出網絡表到ARSE
原理圖制作完成后點擊ARES圖標進入PCB繪制界面,由于電源沒有封裝,會出現提示選擇封裝界面,這里用一個兩插口的CNN-SIL2代替,點擊確定。
選擇當前層為Board
4.2、設置制版規則
4.3、布局
手動布局,點擊元件不放拉到適合的區域松手,依次把元件放到理想的地方,注意把電源的插口放在偏外的區域以便使用的方便。
4.4、布線
布局完成后點擊自動布線,選擇確定,完成自動布線,檢查一下不要出現有
直角的導線(參考布線規則)。
4.5、完成PCB制作
完成后的設計如下圖: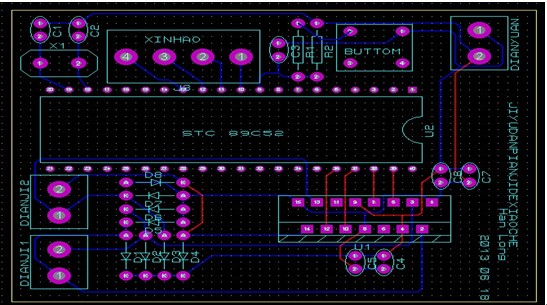
五、結束語

評論