基于51單片機的直流電機驅動(L298)

1,L298內部的原理圖
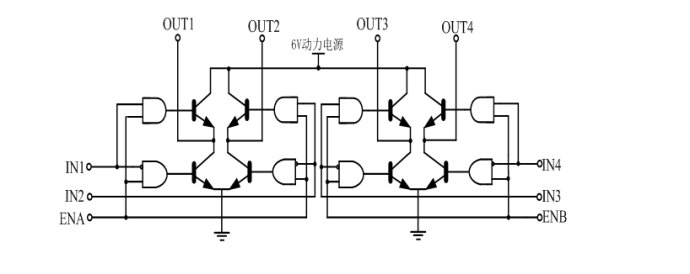
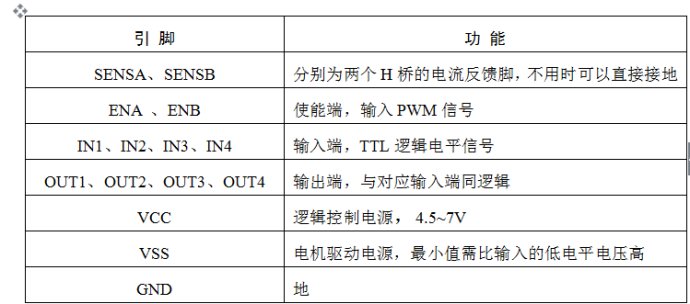
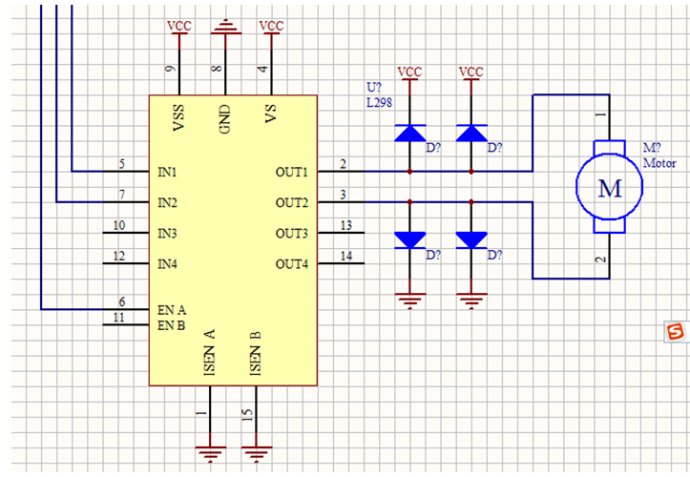
2,L298
3,L298的邏輯功能
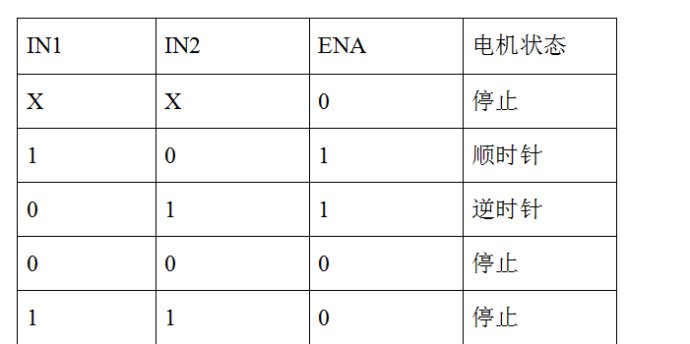
當使能端為高電平時,輸入端IN1為PWM信號,IN2為低電平信號時,電機正轉;輸入端IN1為低電平信號,IN2為PWM信號時,電機反轉;;IN1與IN2相
在對直流電動機電壓的控制和驅動中,半導體功率器件(L298)在使用上可以分為兩種方式:線性放大驅動方式和開關驅動方式在線性放大驅動方式。
半導體功率器件工作在線性區優點是控制原理簡單,輸出波動小,線性好,對鄰近電路干擾小,缺點為功率器件工作在線性區,功率低和散熱問題嚴重。開關驅動方式是使半導體功率器件工作在開關狀態,通過脈調制(PWM)來控制電動機的電壓,從而實現電動機轉速的控制。
#include
#include
#define uchar unsigned char
#define uint unsigned int
sbit MOTOR_A_1=P3^6;
sbit MOTOR_A_2=P3^7;
sbit k1=P1^0; //定義k1為p1.0口
sbit k2=P1^1;
sbit k3=P1^2;
sbit k4=P1^3;
uchar T=0;
uchar W=0;
uchar A=0;
uchar k=0;
uchar i=0;
uchar code table1[]={
0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71};
uchar code table2[]={0xfe,0xfb,0xfd,0xf7};
void delayms(uint t);
void disp(void)
{
P2=table2[3];
P0=table1[W]; //顯示占空比個位
delayms(1); //延時1ms
P2=0xff; //P0清1
P2=table2[2];
P0=table1[W/100]; //顯示占空比百位
delayms(1); //延時1ms
P2=0xff; //P0清1
P2=table2[1];
P0=table1[W/10];
delayms(1); //延時1ms
P2=0xff;
P2=table2[0];
P0=table1[A];
delayms(1); //延時1ms
P2=0xff; //P0清1
}
void init(void)
{
//啟動中斷
TMOD=0x01;
EA=1;
ET0=1;
TR0=1;
//設置定時時間
TH0=0xff;
TL0=0xf6;
}
void timer0() interrupt 1
{
//重置定時器時間
TH0=0xff;
TL0=0xf6;
T++; //定時標記加1
disp(); //數碼管顯示
if(k==0)
{
if(T>W)
MOTOR_A_1 =0;
else
MOTOR_A_1 =1;
}
else
{
if(T>W)
MOTOR_A_2 =0;
else
MOTOR_A_2 =1;
}
if(T==100)
T=0;
}
void delayms(uint t)
{
uchar j;
while(t--)
{
for(j=0;j<250;j++) //循環250次
{
}
}
}
void key(void)
{
if(k1==0) //按鍵1按下
{
while(k1==0); //按鍵1抬起
if(W==100) //如果脈寬為100
W=0; //脈寬置0
else
W+=1; //否則加1
}
else if(k2==0) //按鍵2按下
{
while(k2==0); //按鍵2抬起
if(W==0) //如果脈寬為0
W=100; //脈寬設置成100
else
W-=1; //否則減1
}
else if(k3==0) //按鍵3按下
{
while(k3==0); //按鍵3抬起
A=!A; //方向標記取反
k=!k; //按鍵標記取反
}
else if(k4==0) //按鍵4按下
{
while(k4==0); //按鍵4抬起
W=0; //脈寬清0
}
}

評論