ARM匯編指令詳解1

Code Warrior IDE提供了一個簡單通用的圖形化用戶界面用于管理項目。可以以ARM處理器為對象,利用CodeWarrior IDE開發C、C++和ARM匯編代碼。
AXD是ADS軟件中獨立于CodeWarrior IDE的圖形軟件,AXD用于對程序進行調試。(和Jlink一起使用)
工作狀態
從編程的角度看,ARM微處理器的工作狀態一般有兩種,并可在兩種狀態之間切換:
- ARM狀態,此時處理器執行的是32位的字對齊的ARM指令。
- Thumb狀態,此時處理器執行的是16位半字對齊的Thumb指令。
在程序執行過程中,微處理器可以隨時在兩種工作狀態之間切換,并且,處理器工作狀態的轉變并不影響處理器的工作模式和相應寄存器中的內容。
存儲器格式
ARM體系結構將存儲器看作是從零地址開始的字節的線性組合。從零字節到三字節放置第一個存儲的字(32位)數據,從第四個字節到第七個字節放置第二個存儲的字數據,依次排列。作為32位的微處理器,ARM體系結構所支持的最大尋址空間是4G。
ARM體系結構可以用兩種方式來存儲字數據,稱之為大端格式和小端格式。
- 大端格式:字數據的高字節存儲在低地址上,而低字節存儲在高地址上。
- 小端格式:字數據的高字節存儲在高地址上,而低字節存儲在低地址上。
ARM微處理器的指令長度可以是32位(在ARM狀態下),也可以為16位(在Thumb狀態下)。ARM微處理器中支持字節(8位)、半字(16位)、字(32位)三種數據類型,
ARM支持7中工作模式,分別為:
1、用戶模式(Usr):用于正常執行程序
2、快速中斷模式(FIQ):用于高速數據傳輸
3、外部中斷模式(IRQ):用于通常的中斷處理
4、管理模式(svc):操作系統使用的保護模式
5、數據訪問終止模式(abt):當數據或指令預取終止時進入該模式,可用于虛擬存儲及存儲保護。
6、系統模式(sys):運行具有特權的操作系統任務。
7、未定義指令中止模式(und):當未定義的指令執行時進入該模式,可用于支持硬件
ARM微處理器的工作模式可以通過軟件改變,也可以通過外部中斷或異常處理改變。應用程序運行在用戶模式下,當處理器運行在用戶模式下時,某些被保護的系統資源是不能被訪問的。
除用戶模式以外,其余六種模式稱為非用戶模式或特權模式;其中除用戶模式和系統模式外的5種又稱為異常模式,常用于處理中斷或異常,以及需要訪問受保護的系統資源等情況。
ARM的寄存器
ARM微處理器共有37個32位寄存器,其中31個通用寄存器,6個為狀態寄存器。但是這些寄存器不能被同時訪問,具體哪些寄存器可以訪問,取決于ARM工作狀態及具體的運行模式。但在任何時候,通用寄存器R14-R0、程序計數器PC、一個狀態寄存器都是可以訪問的。
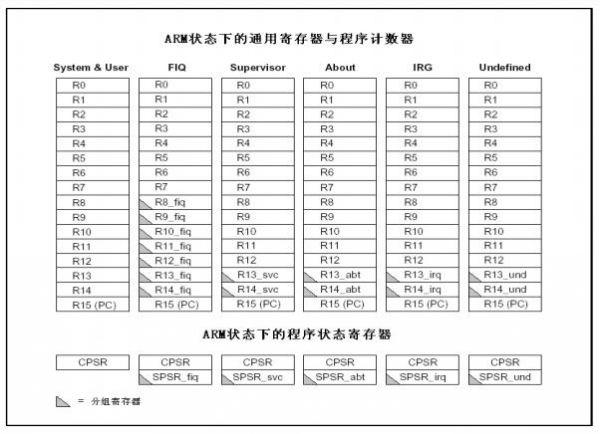
寄存器(ARM狀態):在ARM工作狀態下,任一時刻可以訪問16個通用寄存器和一到兩個狀態寄存器。在非用戶模式下(特權模式)下,則可訪問到特定模式分組寄存器,具體見圖:
寄存器(Thumb狀態):是ARM狀態下寄存器集的一個子集,程序可以直接訪問8個通用寄存器(R7-R0)、程序計數器(PC)、堆棧指針(SP)、連接寄存器(LR)和CPSR。具體見下頁圖:

Thumb狀態下的寄存器組織與ARM狀態下的寄存器組織的關系:
- Thumb狀態下和ARM狀態下的R0-R7是相同的。
- Thumb狀態下和ARM狀態下的CPSR和SPSR是相同的。
- Thumb狀態下的SP對應于ARM狀態下的R13。
- Thumb狀態下的LR對應于ARM狀態下的R14。
- Thumb狀態下的程序計數器PC對應于ARM狀態下R15。
不分組寄存器(The unbanked registers)
R0—R7
分組寄存器(The banked registers)
R8—R14
程序計數器:
R15(PC)
- R0-R7是不分組寄存器。這意味著在所有處理器模式下,訪問的都是同一個物理寄存器。未分組寄存器沒有被系統用于特別的用途,任何可采用通用寄存器的應用場合都可以使用未分組寄存器。
- 分組寄存器R8-R12
- 分組寄存器R13、R14.
R13通常用做堆棧指針SP,R14用作子程序鏈接寄存器,指向函數的返回地址。 - R15是程序計數器,也稱為PC。其值等于當前正在執行的指令的地址+8(因為在取址和執行之間多了一個譯碼的階段)。
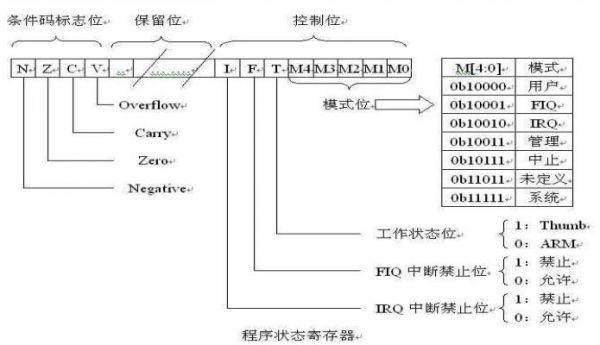
狀態寄存器:
ARM所有工作模式下都可以訪問程序狀態寄存器CPSR。CPSR包含條件碼標志、中斷禁止位、當前處理器模式以及其它狀態和控制信息。CPSR在每種異常模式下都有一個對應的物理寄存器—程序狀態保存寄存器SPSR。當異常出現時,SPSR用于保存CPSR的值,以便異常返回后恢復異常發生時的工作狀態。
ARM的尋址方式:
所謂尋址方式就是處理器根據指令中給出的地址信息來尋找物理地址的方式。
立即尋址:操作數本身就在指令中給出。
ADD R0, R0,#1
ADDR0,R0,#0x3f
第二個源操作數即為立即數,要求以“#”為前綴。
寄存器尋址:利用寄存器中的數值作為操作數。
ADDR0,R1,R2
寄存器間接尋址:以寄存器中的值作為操作數的地址,而操作數本身存放在存儲器中。
ADDR0,R1,[R2]
LDR
基址變址尋址:將寄存器(該寄存器一般稱為基址寄存器)的內容與指令中的給出的地址偏移量相加,從而得到一個操作數的有效地址。
LDRR0,[R1,#4]
LDRR0,[R1,#4]!
LDR R0,[R1],#4
LDR R0, [R1,R2]
多寄存器尋址:一條指令可以完成多個寄存器值的傳送。最多實現16個通用寄存器值得傳送。
LDMIAR0,{R1,R2,R3,R4}
該指令的后綴IA表示在每次執行完加載后,R0按字長增加,因此,指令可將連續存儲單元的值傳送到R1 -R4。
相對尋址:以程序計數器PC的當前值為基地址,指令中的地址標號作為偏移量,將兩者相加之后得到操作數的有效地址。
BLNEXT
......
NEXT
......
MOV PC,LR
堆棧尋址:堆棧是一種數據結構,使用一個稱作堆棧指針的專用寄存器指示當前的操作位置,堆棧指針總是指向棧頂。
遞增堆棧:向高地址方向生長
遞減堆棧:向低地址方向生長
滿堆棧:堆棧指針指向最后壓入堆棧的有效數據項
空堆棧:堆棧指針指向下一個要放入數據的空位置
ARM指令集
跳轉指令:實現程序流程的跳轉,1.使用專門的跳轉指令。2.直接向程序計數器PC寫入跳轉地址值。(跳轉之前結合使用 MOV LR,PC.保存將來返回地址值,從而實現在4G連續的線性地址空間的子程序調用。)
指令:B、BL、BLX、BX
B{條件}
B Label
程序無條件跳轉到標號Label處執行
CMP
BEQ Label
當CPSR寄存器中的Z條件碼置位時,程序跳轉到標號Label處執行。

BL{條件} 目標地址
在跳轉之前,會在寄存器R14中保存PC當前值。
BLX 目標地址
從ARM指令集跳轉到指令中所指定的目標地址,并將處理器的工作狀態由ARM狀態切換到Thumb狀態,該指令同時將PC的當前內容保存到寄存器R14中。因此,當子程序使用Thumb指令集,而調用者使用ARM指令集時,可以通過BLX指令實現子程序的調用和處理器工作狀態的切換。同時,子程序的返回可以通過將寄存器R14值到PC中來完成。
BX{條件} 目標地址
目標地址可以是ARM指令,也可以是Thumb指令。
B
BL
BLX
BX
數據處理指令:數據傳送指令、算術邏輯運算指令和比較指令
MOV{條件}{S} 目的寄存器,源操作數
MOV指令完成從另一個寄存器、被移位的寄存器或進一個立即數加載到目的寄存器。其中S選項決定指令的操作是否影響CPSR中條件標志位的值,當沒有S時指令不更新CPSR中條件標志位的值。
MOV R1, R0,LSL#3
MVN{條件}{S} 目的寄存器,源操作數
MVN指令可完成從另一個寄存器、被移位的寄存器、或將一個立即數加載到目的寄存器。與MOV指令不同之處是在傳送之前按位被取反了,即把一個被取反的值傳送到目的寄存器中。其中S決定指令的操作是否影響CPSR中條件標志位的值,當沒有S時指令不更新CPSR中條件標志位的值。
MVNR0,#0xff
CMP{條件}操作數1,操作數2
CMP指令用于把一個寄存器的內容和另一個寄存器的內容或立即數進行比較,同時更新CPSR中條件標志位的值。該指令進行一次減法運算,但不存儲結果,只更改條件標志位。標志位表示的是操作數1與操作數2的關系(大、小、相等),例如,當操作數1大于操作數2時,此后的有GT后綴的指令將可以執行。
CMP R1,R0
CMPR1,#100
TST{條件} 操作數1,操作數2
TST指令用于把一個寄存器的內容和另一個寄存器的內容或立即數進行按位的與運算,并根據運算結果更新CPSR中條件標志位的值。操作數1是要測試的數據,而操作數2是一個位掩碼(掩碼是一串二進制代碼對目標字段進行位與運算,屏蔽當前的輸入位),根據測試結果設置相應標志位。當位與結果為0時,EQ位被設置。
TSTR1,#%1
ADD{條件}{S} 目的寄存器,操作數1,操作數2
ADD指令用于把兩個操作數相加,并將結果存放到目的寄存器中。操作數1應是一個寄存器,操作數2可以是一個寄存器,被移位的寄存器,或一個立即數。
ADDR0,R1,R2,LSL#1
SUB{條件}{S} 目的寄存器,操作數1,操作數2
SUB指令用于把操作數1減去操作數2,并將結果存放到目的寄存器中。操作數1應是一個寄存器,操作數2可以是一個寄存器,被移位的寄存器,或一個立即數。
SUBR0,R2,R3,LSL#1
AND{條件}{S} 目的寄存器,操作數1,操作數2
AND指令用于在兩個操作數上進行邏輯與運算,并把結果放置到目的寄存器中。操作數1應是一個寄存器,操作數2可以是一個寄存器,被移位的寄存器,或一個立即數。該指令常用于屏蔽操作數1的某些位。
ANDR0,R0,#3
ORR{條件}{S} 目的寄存器,操作數1,操作數2
ORR指令用于在兩個操作數上進行邏輯或運算,并把結果放置到目的寄存器中。操作數1應是一個寄存器,操作數2應是一個寄存器,被移位寄存器,或一個立即數。該指令常用于設置操作數1的某些位。
ORRR0,R0,#3
BIC{cond}{S} Rd,Rn,operand2
BIC指令用于清除Rn中的某些位,并把結果存放在Rd中,操作數operand2為32位的掩碼,如果掩碼中設置了某一位為1,則清除這一位。
BICR0,R0,#11
MUL{條件}{S}
MUL指令完成將操作數1與操作數2的乘法運算并把結果放置到目的寄存器中,同時可以根據運算結果設置CPSR中相應的條件標志位。其中,操作數1和操作數2均為32位的有符號數或無符號數。
MUL
MULS
程序狀態寄存器訪問指令
ARM微處理器支持程序狀態寄存器訪問指令,用于在程序狀態寄存器和通用寄存器之間傳送數據。
MRS{條件} 通用寄存器,程序狀態寄存器(CPSR或SPSR)
MRS的用處是將狀態寄存器中的內容傳遞到通用寄存器中。
1、當需要修改程序狀態寄存器中內容時,可用MRS進程序狀態寄存器的內容讀入到通用寄存器,修改后再寫回程序狀態寄存器。
2、當在異常處理或進程切換時,需要保存程序狀態寄存器的值,可先用MRS讀出程序狀態寄存器的值,然后保存。
MRS R0,CPSR
MSR{條件}程序狀態寄存器(CPSR或SPSR)_<域>,操作數
MSR指令用于將操作數的內容傳遞到程序狀態寄存器的特定域中。其中,操作時可以是通用寄存器或立即數。<域>用于設置程序狀態寄存器中需要操作的位,32位的程序狀態寄存器可分為4個域:
位[31:24]為條件標志位域,用f表示;
位[15:8]為擴展位域,用x表示;
MSR CPSR,R0
MSRCPSR_c,R0

評論