6位LED顯示單片機控制電子鐘/計數器

產品1:6位LED顯示單片機控制電子鐘/計數器成品板成品每套84元
本文引用地址:http://www.104case.com/article/201611/317464.htm
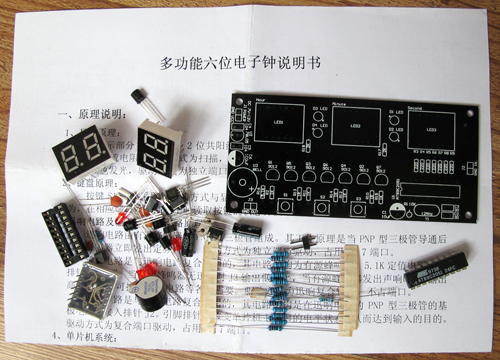
硬件參數板上資源:MCU STC89C52、6位Led顯示、3位按鍵。電源部分為5V直流電壓,需要穩壓、濾波電路,不能接反!
51單片機做的電子鐘在很多地方都有介紹, 對于單片機學習者來說這個程序基本上是一道門檻,掌握了電子鐘程序, 基本上可以說51單片機就掌握了80%。常見的電子鐘程序由顯示部分、計算部分、時鐘調整部分構成,本產品硬件上完全支持倒計時器,客戶只要自己修改程序就能實現倒計時功能。
為了實現LED顯示器的數字顯示,可以采用靜態顯示法和動態顯示法。由于靜態顯示法需要數據鎖存器等硬件,接口復雜一些。考慮時鐘顯示只有六位,且系統沒有其它復雜的處理任務,所以決定采用動態掃描法實現LED的顯示。單片機采用易購的AT89S51系列,這樣單片機可具有足夠的空余硬件資源實現其它的擴充功能,硬件系統的總體構成如下圖所示:視頻演示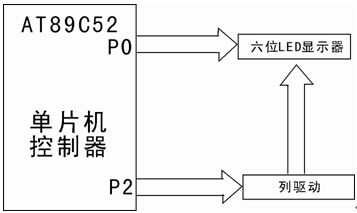 http://xie-gang.com/SZDZZ.htm視頻演示
http://xie-gang.com/SZDZZ.htm視頻演示
該板采用AT89S51單片機,最小化應用設計,采用共陽七段LED顯示器,P0口輸出段碼數據,P2.0~P2.5做列掃描輸出,P1.0,P1.2,P1.3,接三個按鍵開關,用以調時及功能設置。為了提高共陽數碼管的驅動電壓,用9012做電源驅動輸出。采用12M晶振,有利于提高秒計時的精度。
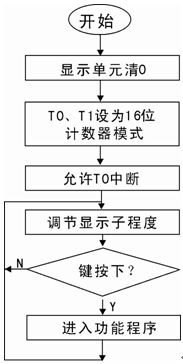
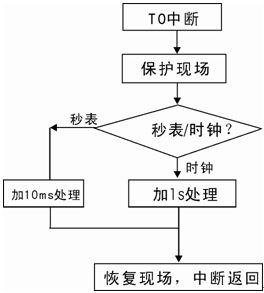
本設計中,計時采用定時器T0中斷完成,其余狀態循環調用顯示子程序,當端口開關按下時,轉入相應功能程序。其主程序執行流程圖見下左圖:
數碼管顯示的數據存放在內存單元70H~75H中。其中70H~71H存放秒數據,72H~73H存放分數據,74H~75H存放時數據,每一地址單元內均為十進制BCD碼。由于采用軟件動態掃描實現數據顯示功能,顯示用十進制BCD碼數據的對應段碼存放在ROM表中。顯示時,先取出70H~~75H某一地址中的數據,然后查得對應的顯示用段碼,并從P0口輸出,P2口將對應的數碼管選中供電,就能顯示該地址單元的數據值。
定時器T0用于時間計時。定時溢出中斷周期可分別設為50mst和10ms。中斷進入后,先判斷是時鐘計時還是秒表計時,時鐘計時累計中斷20次(即1s)時,對秒計數單元進行加1操作,秒表計時每10ms進行加1操作。時鐘計數單元地址分別在70H~71H(秒)、76H~77H(分)和78H~79H(時),最大計時值為23時59分59秒。而秒表計數單元地址也在70H~~71H(0.01毫秒)、76H~~77H(秒)和78H~~79H(分),最大計時值為99分59.99秒。7AH單元內存放“熄滅符”數據(#0AH)。在計數單元中采用十進制BCD碼計數,滿60(秒表功能時有100)進位,T0中斷服務程序執行流程見上圖右
T1中斷服務程序用于指示調整單元數字的亮閃。在時間調整狀態下,每過0.3S將對應單元的顯示數據換成“熄滅符”數據(#0AH)。這樣在調整時間時,對應調整單元的顯示數據會間隔閃亮。
調時功能程序的設計方法是:按下P1.0口按鍵,若按下時間短于1 s則進入省電狀態(數碼管不亮,時鐘不停);否則進入調分狀態,等待操作,此時計時器停止走動。當再按下按鈕時,若按下時間短于0.5s,則時間加1分;若按下時間長于0.5s,則進入[小]時調整狀態。在[小]時調整狀態下,當按鍵按下的時間長于0.5s時,退出調整狀態,時鐘繼續走動。P1.1口按鍵在調時狀態下可實現減1功能。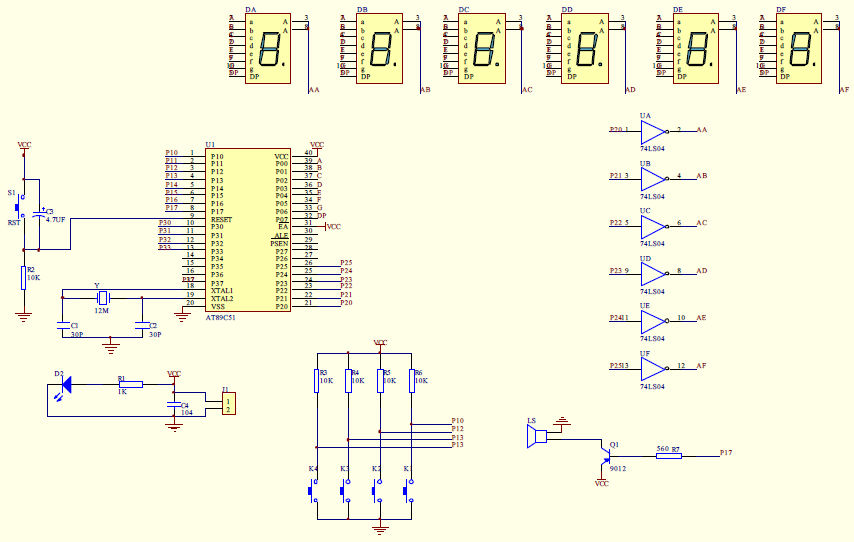
使用方法:按下K1按鍵,如果按下時間小于1秒,就會進入省電模式,這時數碼管熄滅但是時鐘仍然運行。如果按下K1按鍵時間大于1秒,就會進入調分狀態,此時計時器停止走動等待操作,這時中間的兩位00會閃爍,這時當按下K1按鍵時間小于0.5秒時,時間信息就會加1(單位分鐘);若時間大于0.5秒,這時左邊的兩位00會閃爍,進入小時調整,在小時調整狀態下按下S6按鍵時間小于0.5秒時,時間信息就會加1(單位小時),如果按下按鍵時間大于0.5S時,就會退出調整狀態,時鐘繼續走動。
配件:采用PL2303芯片的USB轉TTL串口模塊每個15元含一根4芯杜邦連接線
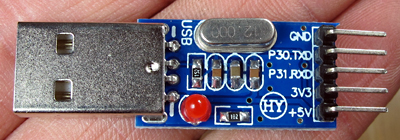
你還可以另外購買我們的PL2303模塊,就能實現STC芯片的在線程序下載。只要連接3根線:一根串口入R連接單片機的P3.1TXD、一根串口出D連接單片機的P3.0 RXD、一根地線-連接單片機的電源地即可。
然后將PL2303的USB轉串口模塊插入電腦的USB口(已經安裝好2303的驅動),然后在STC編程軟件界面中選擇單片機型號STC89C52RC,選擇COM6(具體按電腦實際虛擬出的串口號)波特率選擇9600,點擊“OPEN FILE”選擇你的燒寫文件,點擊“下載”按鈕,然后接通超聲波測距成品學習板的電源,3秒左右就能完成程序下載并運行。
以下是部分匯編源程序,購買我們產品后我們可以通過電子郵件將完整的單片機匯編源程序和燒寫文件發送給客戶。;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; AT89S51時鐘程序 ;;(該程序不全,不要直接使用。購買產品后提供全部程序和圖紙)
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
; 定時器T0、T1溢出周期為50MS,T0為秒計數用, T1為調整時閃爍用,
; P1.0、P1.1、P1.2為調整按鈕,P0口 為字符輸出口,采用共陽顯示管。
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; 中斷入口程序 ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
ORG 0000H ;程序執行開始地址
LJMP START ;跳到標號START執行
ORG 0003H ;外中斷0中斷程序入口
RETI ;外中斷0中斷返回
ORG 000BH ;定時器T0中斷程序入口
LJMP INTT0 ;跳至INTTO執行
ORG 0013H ;外中斷1中斷程序入口
RETI ;外中斷1中斷返回
ORG 001BH ;定時器T1中斷程序入口
LJMP INTT1 ;跳至INTT1執行
ORG 0023H ;串行中斷程序入口地址
RETI ;串行中斷程序返回
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; 主 程 序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
START: LCALL ST ;上電顯示年月日及班級學號
MOV R0,#70H ;清70H-7AH共11個內存單元
MOV R7,#0BH ;
CLEARDISP: MOV @R0,#00H ;
INC R0 ;
DJNZ R7,CLEARDISP ;
MOV 20H,#00H ;清20H(標志用)
MOV 7AH,#0AH ;放入"熄滅符"數據
MOV TMOD,#11H ;設T0、T1為16位定時器
MOV TL0,#0B0H ;50MS定時初值(T0計時用)
MOV TH0,#3CH ;50MS定時初值
MOV TL1,#0B0H ;50MS定時初值(T1閃爍定時用)
MOV TH1,#3CH ;50MS定時初值
SETB EA ;總中斷開放
SETB ET0 ;允許T0中斷
SETB TR0 ;開啟T0定時器
MOV R4,#14H ;1秒定時用初值(50MS×20)
START1: LCALL DISPLAY ;調用顯示子程序
JNB P1.0,SETMM1 ;P1.0口為0時轉時間調整程序
JNB P1.1,FUNSS ; 秒表功能,P1.1按鍵調時時作減1加能
JNB P1.2,FUNPT ;STOP,PUSE,CLR
SJMP START1 ;P1.0口為1時跳回START1
SETMM1: LJMP SETMM ;轉到時間調整程序SETMM
FUNSS: LCALL DS20MS
JB P1.1,START1
WAIT11: JNB P1.1,WAIT11
CPL 03H
MOV 70H,#00H
MOV 71H,#00H
MOV 76H,#00H
MOV 77H,#00H
MOV 78H,#00H
MOV 79H,#00H
AJMP START1
FUNPT: LCALL DS20MS
JB P1.2,START1
WAIT22: JNB P1.2,WAIT21
CLR ET0
CLR TR0
WAIT33: JB P1.2,WAIT31
LCALL DS20MS
JB P1.2,WAIT33
WAIT66: JNB P1.2,WAIT61
MOV R0,#70H ;清70H-79H共10個內存單元
MOV R7,#0AH ;
CLEARP: MOV @R0,#00H ;
INC R0 ;
DJNZ R7,CLEARP ;
WAIT44: JB P1.2,WAIT41
LCALL DS20MS
JB P1.2,WAIT44
WAIT55: JNB P1.2,WAIT51
SETB ET0
SETB TR0
AJMP START1
WAIT21: LCALL DISPLAY
AJMP WAIT22
WAIT31: LCALL DISPLAY
AJMP WAIT33
WAIT41: LCALL DISPLAY
AJMP WAIT44
WAIT51: LCALL DISPLAY
AJMP WAIT55
WAIT61: LCALL DISPLAY
AJMP WAIT66
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; 1秒計時程序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;T0中斷服務程序
INTT0: PUSH ACC ;累加器入棧保護
PUSH PSW ;狀態字入棧保護
CLR ET0 ;關T0中斷允許
CLR TR0 ;關閉定時器T0
JB 03H,FSS
MOV A,#0B7H ;中斷響應時間同步修正
ADD A,TL0 ;低8位初值修正
MOV TL0,A ;重裝初值(低8位修正值)
MOV A,#3CH ;高8位初值修正
ADDC A,TH0 ;
MOV TH0,A ;重裝初值(高8位修正值)
SETB TR0 ;開啟定時器T0
DJNZ R4, OUTT0 ;20次中斷未到中斷退出
ADDSS: MOV R4,#14H ;20次中斷到(1秒)重賦初值
MOV R0,#71H ;指向秒計時單元(71H-72H)
ACALL ADD1 ;調用加1程序(加1秒操作)
MOV A,R3 ;秒數據放入A(R3為2位十進制數組合)
CLR C ;清進位標志
CJNE A,#60H,ADDMM ;
ADDMM: JC OUTT0 ;小于60秒時中斷退出
ACALL CLR0 ;大于或等于60秒時對秒計時單元清0
MOV R0,#77H ;指向分計時單元(76H-77H)
ACALL ADD1 ;分計時單元加1分鐘
MOV A,R3 ;分數據放入A
CLR C ;清進位標志
CJNE A,#60H,ADDHH ;
ADDHH: JC OUTT0 ;小于60分時中斷退出
ACALL CLR0 ;大于或等于60分時分計時單元清0
MOV R0,#79H ;指向小時計時單元(78H-79H)
ACALL ADD1 ;小時計時單元加1小時
MOV A,R3 ;時數據放入A
CLR C ;清進位標志
JB 03H,OUTT0 ;秒表時最大數為99
CJNE A,#24H,HOUR ;
HOUR: JC OUTT0 ;小于24小時中斷退出
ACALL CLR0 ;大于或等于24小時小時計時單元清0
OUTT0: MOV 72H,76H ;中斷退出時將分、時計時單元數據移
MOV 73H,77H ;入對應顯示單元
MOV 74H,78H ;
MOV 75H,79H ;
POP PSW ;恢復狀態字(出棧)
POP ACC ;恢復累加器
SETB ET0 ;開放T0中斷
RETI ;中斷返回
;秒表計時程序(10MS加1),低2位為0.1、0.01秒,中間2位為秒,最高位為分。
;最大計數值為99
FSS: MOV A,#0F7H ;中斷響應時間同步修正,重裝初值(10ms)
ADD A,TL0 ;低8位初值修正
MOV TL0,A ;重裝初值(低8位修正值)
MOV A,#0D8H ;高8位初值修正
ADDC A,TH0 ;
MOV TH0,A ;重裝初值(高8位修正值)
SETB TR0 ;開啟定時器T0
MOV R0,#71H ;指向秒計時單元(71H-72H)
ACALL ADD1 ;調用加1程序(加1秒操作)
CLR C ;
MOV A,R3 ;
JZ FSS1 ;加1后為00,C=0
SETB C ;加1后不為00,C=1
FSS1: AJMP ADDMM ;
》》》》》》》》》》》省略》》》》》
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; 加1子 程 序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
ADD1: MOV A,@R0 ;取當前計時單元數據到A
DEC R0 ;指向前一地址
SWAP A ;A中數據高四位與低四位交換
ORL A,@R0 ;前一地址中數據放入A中低四位
ADD A,#01H ;A加1操作
DA A ;十進制調整
MOV R3,A ;移入R3寄存器
ANL A,#0FH ;高四位變0
MOV @R0,A ;放回前一地址單元
MOV A,R3 ;取回R3中暫存數據
INC R0 ;指向當前地址單元
SWAP A ;A中數據高四位與低四位交換
ANL A,#0FH ;高四位變0
MOV @R0,A ;數據放入當削地址單元中
RET ;子程序返回
》》》》》》》》》》》省略》》》》》
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; 延時程序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
;1MS延時程序,LED顯示程序用
DL1MS: MOV R6,#14H
#############################################################################################################################################
產品2:采用AT89C2051的6位LED電子鐘(計數器)
一、原理說明:
1、顯示原理:
顯示部分主要器件為2位共陽紅色數碼管,驅動采用PNP型三極管驅動,各端口配有限流電阻,驅動方式為掃描,占用P1.0~P1.6端口。冒號部分采用4個Φ3.0的紅色發光,驅動方式為獨立端口驅動,占用P1.7端口。
2、鍵盤原理:
按鍵S1~S3采用復用的方式與顯示部分的P3.5、P3.4、P3.2口復用。其工作方式為,在相應端口輸出高電平時讀取按鍵的狀態并由單片機支除抖動并賦予相應的鍵值。
3、迅響電路及輸入、輸出電路原理:
迅響電路由有源蜂鳴器和PNP型三極管組成。其工作原理是當PNP型三極管導通后有源蜂鳴器立即發出定頻聲響。驅動方式為獨立端口驅動,占用P3.7端口。
輸出電路是與迅響電路復合作用的,其電路結構為有源蜂鳴器,5.1K定值電阻R6,排針J3并聯。當有源蜂鳴器無迅響時J3輸出低電平,當有源蜂鳴器發出聲響時J3輸出高電平,J3可接入數字電路等各種需要。驅動方式為迅響復合輸出,不占端口。
輸入電路是與迅響電路復合作用的,其電路結構是在迅響電路的PNP型三極管的基極電路中接入排針J2。引腳排針可改變單片機I/O口的電平狀態,從而達到輸入的目的。驅動方式為復合端口驅動,占用P3.7端口。
4、單片機系統:
本產品采用AT89C2051為核心器件(AT89C2051燒寫程序必須借助專用編程器,我們提供的單片機已經寫入程序),并配合所有的必須的電路,只具有上電復位的功能,無手動復位功能。
二、使用說明:
1、功能按鍵說明: S1為功能選擇按鍵,S2為功能擴展按鍵,S3為數值加一按鍵。
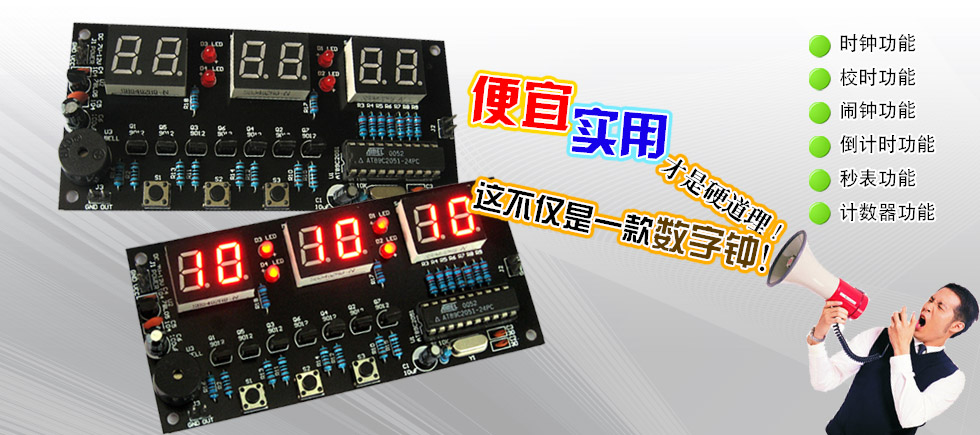
2、功能及操作說明:操作時,連續短時間(小于1秒)按動S1,即可在以上的6個功能中連續循環。中途如果長按(大于2秒)S1,則立即回到時鐘功能的狀態。
1、時鐘功能:上電后即顯示10:10:00 ,寓意十全十美。
2、校時功能:短按一次S1,即當前時間和冒號為閃爍狀態,按動S2則小時位加1,按動S3則分鐘位加1,秒時不可調。
3、鬧鐘功能:短按二次S1,顯示狀態為22:10:00,冒號為長亮。按動S2剛小時位加1,按動S3則分鐘位加1,秒時不可調。當按動小時位超過23時則會顯示--:--:--,這個表示關閉鬧鐘功能。鬧鈴聲為蜂鳴器長鳴3秒鐘。
4、倒計時功能:短按三次S1,顯示狀態為 0,冒號為長滅。按動S2則從低位依此顯示高位,按動S3則相應位加1,當S2按到第6次時會在所設定的時間狀態下開始倒計時,再次按動S2將再次進入調整功能,并且停止倒計時。
5、秒表功能:短按四次S1,顯示狀態為00:00:00,冒號為長亮。按動S2則開始秒表計時,再次按動S2則停止計時,當停止計時的時候按動S3則秒表清零。
6、計數器功能:短按五次S1,顯示狀態為00:00:00,冒號為長滅,按動S2則計數器加1,按動S3則計數器清零。
采用AT89C2051的6位LED電子鐘(計數器)散件每套28元


以下是部分C語言源程序,購買產品后可以向我們索要完整的單片機C語言源程序、燒寫文件和說明書。
#include
code senen_seg[10]={0x81,0xe7,0x92,0xa2,0xe4,0xa8,0x88,0xe3,0x80,0xa0}; //P1.7(冒號)口高電平
bit key1_enter=0,key2_enter=0,key3_enter=0,countdown_mark=0,stopwatch_mark=0,count_mark=0,bell_mark=0; //狀態標志
unsigned char program=0,program_variable=0,count_bit=0,count=0;
unsigned char hour=10,minute=10,second=0; //時間變量
unsigned char delayed_hour=22,delayed_minute=10,delayed_second=0; //定時變量
unsigned char count_hour=0,count_minute=0,count_second=0; //計時計數變量
unsigned int count_time=0,count_count=0;
void delay(unsigned int t) //延時子程序
{
unsigned int i,j;
for(i=0;i
;
}
void time0_init(void){ //定時計數0器初始化
EA=0;
TR0=0;
TMOD=0x02;
TH0=0x4;
TL0=0x4;
ET0=1;
TR0=1;
EA=1;
}
static void timer0_isr(void) interrupt TF0_VECTOR using 1 //定時計數0器中斷函數
{
count_time++; //時鐘計時程序
if(count_time>=4020){
count_time=0;
second++;
if(second>=60){
second=0;
minute++;
if(minute>=60){
minute=0;
hour++;
if(hour>=24)hour=0;
}
}
}
if(delayed_hour==hour && delayed_minute==minute && second<4) P3_7=0;
else P3_7=1;
if(countdown_mark==1){ //倒計時程序
count_count++;
if(count_count>=4000 && (count_second!=0|count_minute!=0|count_hour!=0)){
count_count=0;
count_second--;
if(count_second>=60){
count_second=59;
count_minute--;
if(count_minute>=60){
count_minute=59;
count_hour--;
if(count_hour>=100) count_hour=99;
}
}
}
if(count_second==0&&count_minute==0&&count_hour==0&&count_count<=12000) P3_7=0;
else P3_7=1;
if(count_count>=15000) count_count=14000;
}
if(stopwatch_mark==1){ //秒表程序
count_count++;
if(count_count>=40){
count_count=0;
count_second++;
if(count_second>=100){
count_second=0;
count_minute++;
if(count_minute>=60){
count_minute=0;
count_hour++;
if(count_hour>=60) count_hour=0;
}
}
}
}
}
unsigned char show_key (void){
unsigned char x=0,y=0;
switch (program){
case 0: P1&=senen_seg[second%10]; //時鐘秒的個位
break;
case 1: if(count_time>=2000) P1&=senen_seg[second%10]; //校正秒的個位
break;
case 2: if(delayed_hour==24) P1=0xfe; //鬧鐘秒的個位
else P1&=senen_seg[delayed_second%10];
break;
case 3: if(count_bit>=0) P1&=senen_seg[count_second%10];//倒計時秒的個位
else P1=0xff;
break;
case 4: P1&=senen_seg[count_second%10]; //秒表秒的個位
break;
case 5: P1&=senen_seg[count_second%10]; //計數器個位
break;
}
P3_3=0;
delay(10);
if(P3_5==0){ //功能鍵1識別
key1_enter=1;
if(count<=254)count++;
}
if(P3_4==0) key2_enter=1; //功能鍵2識別
if(P3_2==0) key3_enter=1; //功能鍵3識別
P3_3=1;
P1|=0xff;
switch (program){
case 0: P1&=senen_seg[second/10]; //時鐘秒的十位
break;
case 1: if(count_time>=2000) P1&=senen_seg[second/10]; //校正秒的十位
break;
case 2: if(delayed_hour==24) P1=0xfe; //鬧鐘秒的十位
else P1&=senen_seg[delayed_second/10];
break;
case 3: if(count_bit>=1) P1&=senen_seg[count_second/10];//倒計時秒的十位
else P1=0xff;
break;
case 4: P1&=senen_seg[count_second/10]; //秒表秒的十位
break;
case 5: P1&=senen_seg[count_second/10]; //計數器十位
break;
}
P3_1=0;
delay(10);
P3_1=1;
P1|=0xff;
switch (program){
case 0: P1&=senen_seg[minute%10]; //時鐘分的個位
break;
case 1: if(count_time>=2000) P1&=senen_seg[minute%10]; //校正分的個位
break;
case 2: if(delayed_hour==24) P1=0xfe; //鬧鐘分的個位
else P1&=senen_seg[delayed_minute%10];
break;
case 3: if(count_bit>=2) P1&=senen_seg[count_minute%10];//倒計時分的個位
else P1=0xff;
break;
case 4: P1&=senen_seg[count_minute%10]; //秒表分的個位
break;
case 5: P1&=senen_seg[count_minute%10]; //計數器百位
break;
}
P3_2=0;
delay(10);
P3_2=1;
P1|=0xff;
switch (program){
case 0: P1&=senen_seg[minute/10]; //時鐘秒的個位
break;
case 1: if(count_time>=2000) P1&=senen_seg[minute/10]; //校正秒的個位
break;
case 2: if(delayed_hour==24) P1=0xfe; //鬧鐘秒的個位
else P1&=senen_seg[delayed_minute/10];
break;
case 3: if(count_bit>=3) P1&=senen_seg[count_minute/10];//倒計時秒的個位
else P1=0xff;
break;
case 4: P1&=senen_seg[count_minute/10]; //秒表秒的個位
break;
case 5: P1&=senen_seg[count_minute/10]; //計數器千位
break;
}
P3_5=0;
delay(10);
P3_5=1;
P1|=0xff;
switch (program){
case 0: P1&=senen_seg[hour%10]; //時鐘時的個位
break;
case 1: if(count_time>=2000) P1&=senen_seg[hour%10]; //校正時的個位
break;
case 2: if(delayed_hour==24) P1=0xfe; //鬧鐘時的個位
else P1&=senen_seg[delayed_hour%10];
break;
case 3: if(count_bit>=4) P1&=senen_seg[count_hour%10];//倒計時時的個位
else P1=0xff;
break;
case 4: P1&=senen_seg[count_hour%10]; //秒表時的個位
break;
case 5: P1&=senen_seg[count_hour%10]; //計數器萬位
break;
}
P3_0=0;
delay(10);
if(P3_4==1 && key2_enter==1){
x=3; //確認功能鍵2識別,返回3
key2_enter=0;
}
P3_0=1;
P1|=0xff;
switch (program){
case 0: P1&=senen_seg[hour/10]; //時鐘時的個位
break;
case 1: if(count_time>=2000) P1&=senen_seg[hour/10]; //校正時的個位
break;
case 2: if(delayed_hour==24) P1=0xfe; //鬧鐘時的個位
else P1&=senen_seg[delayed_hour/10];
break;
case 3: if(count_bit>=5)P1&=senen_seg[count_hour/10]; //倒計時時的個位
else P1=0xff;
break;
case 4: P1&=senen_seg[count_hour/10]; //秒表時的個位
break;
case 5: P1&=senen_seg[count_hour/10]; //計數器萬位
break;
}
P3_4=0;
delay(10);
if(P3_5==1 && key1_enter==1){ //確認功能鍵1識別,執行退出或進入下一個功能
if(count>=127) x=1; //確認功能鍵1為長按,返回1
else x=2; //確認功能鍵1為短按,返回2
key1_enter=0;
count=0;
}
if(P3_2==1 && key3_enter==1){
x=4; //確認功能鍵3識別,返回4
key3_enter=0;
}
P3_4=1;
P1|=0xff;
if(program<=1 && count_time>=2000) P1&=0xff; //校時和顯示功能時鐘時冒號閃爍
if(program<=1 && count_time<=2000) P1&=0x7f;
if(program==2) P1&=0x7f; //設置鬧鐘功能時冒號長亮
if(program==3) P1&=0xff; //設置倒計時功能時冒號長滅
if(program==4) P1&=0x7f; //設置秒表功能時冒號長亮
if(program==5) P1&=0xff; //設置計數時冒號長滅
y=x;
x=0;
return y;
}
void main(){ //主程序
P1=0xff;
P3=0xff;
time0_init();
while(1){
switch(program){
case 0: while(program==0){ //時鐘菜單
switch(show_key()){
case 0: break;
case 1: program=0;
break;
case 2: program=1;
break;
}
}
break; //校時菜單
case 1: while(program==1){
switch(show_key()){
case 0: break;
case 1: program=0;
break;
case 2: program=2;
break;
case 3: hour++;
if(hour>=24)hour=0;
break;
case 4: minute++;
if(minute>=60)minute=0;
break;
}
}
break;
case 2: while(program==2){ //鬧鐘菜單
switch(show_key()){
case 0: break;
case 1: program=0;
break;
case 2: program=3;
break;
case 3: delayed_hour++;
if(delayed_hour>=25)delayed_hour=0;
break;
case 4: delayed_minute++;
if(delayed_minute>=60)delayed_minute=0;
break;
}
}
break;
case 3: while(program==3){ //倒計時菜單
switch(show_key()){
case 0: break;
case 1: program=0;
break;
case 2: program=4;
break;
case 3: count_bit++;
if(count_bit>=7)count_bit=0;
break;
case 4: switch(count_bit){
case 0: count_second+=1;
break;
case 1: count_second+=10;
break;
case 2: count_minute+=1;
break;
case 3: count_minute+=10;
break;
case 4: count_hour+=1;
break;
case 5: count_hour+=10;
break;
case 6: break;
}
if(count_hour>=100) count_hour-=100;
if(count_minute>=60) count_minute-=60;
if(count_second>=60) count_second-=60;
break;
}
if(count_bit==6) countdown_mark=1;
else countdown_mark=0;
}
break;
case 4: count_hour=0; //秒表菜單
count_minute=0;
count_second=0;
while(program==4){
switch(show_key()){
case 0: break;
case 1: program=0;
break;
case 2: program=5;
break;
case 3: stopwatch_mark=~stopwatch_mark;
break;
case 4: if(stopwatch_mark==0){
count_hour=0;
count_minute=0;
count_second=0;
}
break;
}
}
break; //計數器菜單
case 5: count_hour=0;
count_minute=0;
count_second=0;
while(program==5){
switch(show_key()){
case 0: break;
case 1: program=0;
break;
case 2: program=0;
break;
case 3: count_second++;
if(count_second>=100){
count_second=0;
count_minute++;
if(count_minute>=100){
count_minute=0;
count_hour++;
if(count_hour>=100)count_hour=0;
}
}
break;
case 4: count_hour=0;
count_minute=0;
count_second=0;
break;
}
if(P3_7==0){
while(P3_7==0) show_key();
count_second++;
if(count_second>=100){
count_second=0;
count_minute++;
if(count_minute>=100){
count_minute=0;

評論