步進(jìn)電機(jī)一體化控制系統(tǒng)的設(shè)計

1 引言
本文引用地址:http://www.104case.com/article/201610/311791.htm作為一種數(shù)字伺服執(zhí)行元件,步進(jìn)電機(jī)具有結(jié)構(gòu)簡單、運行可靠、控制方便、控制性能好等優(yōu)點,廣泛應(yīng)用在數(shù)控機(jī)床、機(jī)器人、自動化儀表等領(lǐng)域。為了實現(xiàn)步進(jìn)電機(jī)的簡易運動控制,一般以單片機(jī)作為控制系統(tǒng)的微處理器,通過步進(jìn)電機(jī)專用驅(qū)動芯片實現(xiàn)步進(jìn)電機(jī)的速度和位置定位控制。
2 圓弧插補(bǔ)改進(jìn)算法
逐點比較插補(bǔ)算法因其算法簡單、易實現(xiàn)且最大誤差不超過一個脈沖當(dāng)量,在步進(jìn)電機(jī)的位置控制中應(yīng)用的相當(dāng)廣泛[1>。圓弧插補(bǔ)中,為了確定一條圓弧的軌跡,可采用:給出圓心坐標(biāo)、起點坐標(biāo)和終點坐標(biāo);給出半徑、起點和終點坐標(biāo);給出圓弧的三點坐標(biāo)等。在算法實現(xiàn)時這些參數(shù)若要存放在單片機(jī)內(nèi)部資源有限的數(shù)據(jù)存儲器(RAM)中,如果要經(jīng)過復(fù)雜的運算才能確定一段圓弧,不但給微處理器帶來負(fù)擔(dān),而且要經(jīng)過多步運算,往往會影響到算法的精確度。因此選取一種簡單且精確度高的插補(bǔ)算法是非常必要的。本文提出了一種改進(jìn)算法:在圓弧插補(bǔ)中,無論圓弧在任何位置,是順圓或是逆圓,都以此圓弧的圓心作為原點來確定其他坐標(biāo)。因此只須給出圓弧的起點坐標(biāo)和圓弧角度就可以確定該圓弧。如果一個軸坐標(biāo)用4個字節(jié)存儲(如12.36),而角度用2個字節(jié)存儲(如45°),則只需要10個字節(jié)即可確定一段二維的圓弧。較之起其他方法,最多可節(jié)省14個存儲單元。現(xiàn)以第I象限逆圓弧為例,計算其終點坐標(biāo)。如圖1所示,(X0,Y0)為圓弧的起點坐標(biāo),(Xe,Ye)為圓弧的終點坐標(biāo),θ為圓弧的角度。
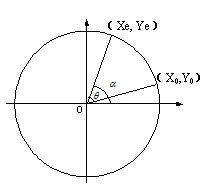
圖1 圓弧軌跡示意圖
圓弧半徑:
終點坐標(biāo):
終點坐標(biāo)相對X軸的角度:
本系統(tǒng)要求輸入的角度精確到1度,輸入坐標(biāo)的分辨率是0.01,單片機(jī)C語言的浮點運算能精確到0.000001,按照上面的公式算出的終點坐標(biāo),雖存在誤差,但這個誤差小于1%,能夠滿足所要求的精確度。
3 步進(jìn)電機(jī)的變頻調(diào)速
雖然步進(jìn)電機(jī)具有快速啟停能力強(qiáng)、精度高、轉(zhuǎn)速容易控制的特點,但是在實際運行過程中由于啟動和停止控制不當(dāng),步進(jìn)電機(jī)仍會出現(xiàn)啟動時抖動和停止時過沖的現(xiàn)象,從面影響系統(tǒng)的控制精度。尤其是步進(jìn)電機(jī)工作在頻繁啟動和停止時,這種現(xiàn)象就更為明顯[2>。為此本文提出了一種基于單片機(jī)控制的步進(jìn)電機(jī)加減速離散控制方法。加減速曲線如圖2 所示,縱坐標(biāo)是頻率 f,單位為脈沖/秒或步/秒。橫坐標(biāo)時間 t,單位為秒。步進(jìn)電機(jī)以 f0 啟動后加速至 t1 時刻達(dá)到最高運行頻率 f,然后勻速運行,至 t2 時刻開始減速,在 t5 時刻電機(jī)停轉(zhuǎn),總的步數(shù)為 N。其中電機(jī)從靜止加速至最高運行頻率和從最高運行頻率至停止至是步進(jìn)電機(jī)控制的關(guān)鍵,通常采用勻加速和勻減速方式。
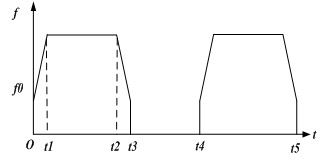
圖2 時間與頻率的函數(shù)圖
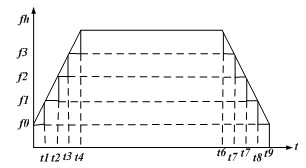
圖3 離散化的時間變頻圖
采用單片機(jī)對步進(jìn)電機(jī)進(jìn)行加減速控制,實際上就是改變輸出脈沖的時間間隔,可采用軟件和硬件兩種方法。軟件方法依靠延時程序來改變脈沖輸出的頻率,其中延時的長短是動態(tài)的,該方法因為要不停地產(chǎn)生控制脈沖,占用了大量的CPU時間;硬件方法是依靠單片機(jī)內(nèi)部的定時器來實現(xiàn)的,在每次進(jìn)入定時中斷后,改變定時常數(shù)(定時器裝載值),從而升速時使脈沖頻率逐漸增大,減速時使脈沖頻率逐漸減小。這種方法占用CPU時間較少,是一種效率比較高的步進(jìn)電機(jī)調(diào)速方法。考慮到單片機(jī)資源(字長)和編程的方便,不需要每步都計算定時器裝載值。如圖3所示,采用離散方法將加減速曲線離散化。離散化后速度是分臺階上升的,而且每上升一個臺階都要在該臺階保持一段時間,以克服由于步進(jìn)電機(jī)轉(zhuǎn)子轉(zhuǎn)動慣量所引起的速度滯后。只有當(dāng)實際運行速度達(dá)到預(yù)設(shè)值后才能急速加速,實際上也是局部速度誤差的自動糾正。
4 系統(tǒng)軟硬件協(xié)同設(shè)計
對于51系列單片機(jī)的軟件開發(fā),傳統(tǒng)的方法是在PC機(jī)上采用Keil等開發(fā)工具進(jìn)行程序設(shè)計、編譯、調(diào)試,待程序調(diào)試通過之后生成目標(biāo)文件下載至單片機(jī)硬件電路再進(jìn)行硬件調(diào)試[3>。這種方法只有硬件電路完成之后才能進(jìn)行系統(tǒng)功能測試,若此時發(fā)現(xiàn)硬件電路存在設(shè)計問題且必須進(jìn)行修改時就會顯著影響系統(tǒng)開發(fā)的成本和周期。為此,本文采用了系統(tǒng)軟硬件協(xié)同仿真的開發(fā)方法,使得硬件電路實現(xiàn)前的功能測試成為可能。同時硬件電路的軟件化仿真為硬件電路的設(shè)計與實現(xiàn)提供了有力的保障。其中在Keil uVision2集成開發(fā)環(huán)境下,實現(xiàn)步進(jìn)電機(jī)控制系統(tǒng)的程序設(shè)計、編譯、調(diào)試,并最終生成目標(biāo)文件 *.hex,而由英國Proteus Labcenter electronics公司所提供的EDA工具Proteus則利用該目標(biāo)文件 *.hex 實現(xiàn)對步進(jìn)電機(jī)控制系統(tǒng)硬件電路功能的測試。
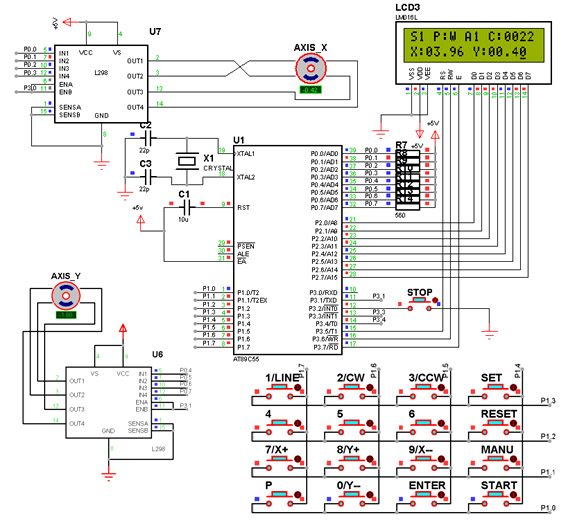
圖4 步進(jìn)電機(jī)控制系統(tǒng)硬件電路仿真
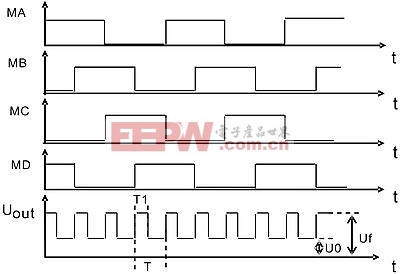
如圖4所示,單片機(jī)AT89C55司職步進(jìn)電機(jī)控制器,通過運行在Keil uVision2 環(huán)境下所開發(fā)的程序來控制兩個步進(jìn)電機(jī)驅(qū)動芯片L298,從而實現(xiàn)對AXIS_X / AXIS_Y兩軸步進(jìn)電機(jī)的聯(lián)動控制。L298驅(qū)動芯片的步進(jìn)脈沖輸入信號來自AT89C55 P0端口,使能信號ENABLE A與ENABLE B并聯(lián)接到AT89C55的P3.0、P3.1口,由程序控制實現(xiàn)步進(jìn)電機(jī)的使能,從而避免電機(jī)線圈處于短路狀態(tài)而燒壞驅(qū)動芯片。4 x 4鍵盤陣列接AT89C55的P1端口,通過程序設(shè)計定義每個按鍵的具體功能。LCD的數(shù)據(jù)端口DB0~DB7接AT89C55的P2端口,控制端口RS, RW, E分別接單片機(jī)的P3.5, P3.6, P3.7口。相關(guān)的參數(shù)值、X/Y軸坐標(biāo)值可以通過LCD以文本方式顯示。本文采用軟硬件協(xié)同仿真的方法經(jīng)過設(shè)計à測試à修正à再測試一次次迭代開發(fā),在制作控制系統(tǒng)硬件電路之前即可實現(xiàn)對系統(tǒng)整機(jī)功能的測試。待系統(tǒng)程序和硬件電路設(shè)計方案最終完善之后便可以實際制作如圖5所示的硬件電路。顯然該種方法可以顯著提高系統(tǒng)軟硬件開發(fā)的成功率,從而有效降低系統(tǒng)的開發(fā)周期和開發(fā)成本。
5 應(yīng)用實例
圖5即是根據(jù)圖4進(jìn)行硬件電路仿真的最終結(jié)果所制作的步進(jìn)電機(jī)控制系統(tǒng)電路板。該電路驅(qū)動X/Y軸步進(jìn)電機(jī)通過滾珠絲桿帶動二維工作臺作聯(lián)動,并由一只鉛筆模擬加工刀具將所要加工的二維軌跡描繪出來。
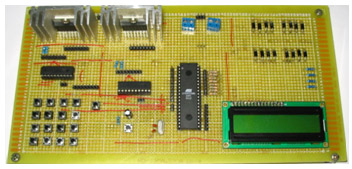
圖5步進(jìn)電機(jī)控制系統(tǒng)硬件電路

圖6 二維模擬工作平臺運動軌跡









評論