一種聲定位自動泊車系統設計

現代化城市交通擁堵,泊車要求較高的駕駛技術,且可能導致交通阻塞、駕駛員神經疲憊和保險杠撞彎等不良后果。如果利用微機控制的自動泊車系統,則可以較好地實現
本文引用地址:http://www.104case.com/article/201610/309169.htm車輛的安全停泊,乃至最終實現汽車的自動駕駛。現代科學技術的快速發展,尤其是計算機技術和傳感器與檢測技術的快速發展為自動泊車提供了可能。自動泊車系統可以解決駕駛員尤其是初學者的煩惱,提升汽車的主動性安全水平,減少泊車入位所消耗的時間,減緩停車場的擁堵程度,提高停車場的利用率。
目前,很多的停車場車位引導系統能夠引導車輛順利進入目的車位,但還需駕駛員根據停車場顯示屏中所顯示的車位引導信息來駕駛車輛,沒有實現車輛運行自動控制和自動泊車。本文所設計的方案首先檢測出每個車位是否有車輛停放,由給定的停車車位分配方法得到下一輛車進入停車場之后所要停放的車位;以聲源定位為基礎,實時測量出車輛在停車場中所處的位置,通過無線電通訊,與車內的車輛運行自動控制系統進行信息傳輸,控制車輛的運行,最終實現車輛的自主泊車。
1 總體方案設計
1.1 停車場及車輛模塊設置
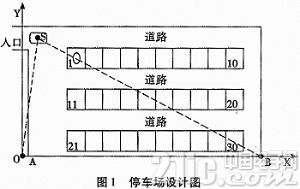
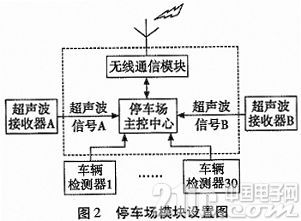
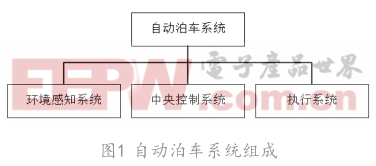
設計停車場的車位分布(如圖1所示)。停車場共設30個車位,每個車位下邊埋有車位檢測器,用來檢測車位的占用情況。停車場四周的邊框為停車場的邊界,建立平面直角坐標系XOY(見圖1)。在A點和B點分別安裝超聲波接收器,用以檢測車輛發出的超聲波來對聲源(車輛)進行定位。在停車場中還設有無線電通信設備,以實現與車輛的無線通信。停車場主控中心負責將地面各個傳感器得到的信息進行處理,并控制無線通信模塊與車輛進行通信。停車場的模塊設置及信號關系如圖2所示。
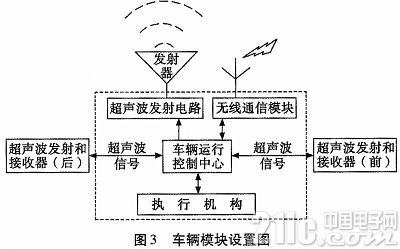
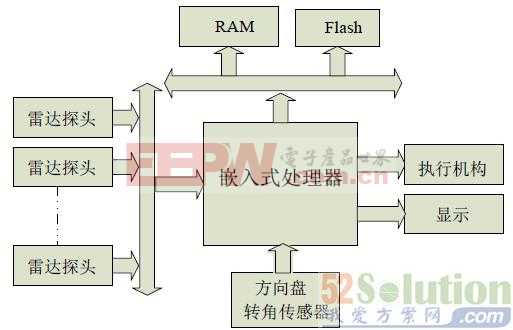
在車輛頂部中央裝有超聲波發射器,用以發射超聲波來進行聲源定位。在車輛的頭部和尾部中央處安裝有超聲波發射接收裝置,用來檢測車輛可能遇到的障礙物或其他車量,避免發生危險。在車輛的頂部還裝有無線電發射和接收裝置,以實現和停車場主控中心的無線通信。車輛各模塊設置及信號關系如圖3所示。
1.2 系統工作流程
系統工作流程如下:
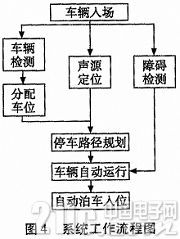
當車輛進入停車場之后,啟動自動泊車系統。車輛檢測器檢測每個車位是否被占用,將車位占用信息傳給停車場主控中心來進行車位分配,得到要停入的車位坐標;聲源檢測模塊實時進行聲源定位,得到車輛的坐標信息并傳給主控中心;停車場主控中心通過無線通信模塊將以上兩個坐標信息傳給車輛內的車輛運行控制中心,車輛運行控制中心根據得到的坐標信息和停車場的車位、道路分布情況,規劃出泊車路徑,控制車輛自動運行、停車入位。在車輛運行過程中,車輛前方和后方的超聲波發射接收裝置實時檢測車輛前后是否有障礙物。一旦發現有障礙物,則立即通過車輛運行控制中心實施剎車,避免發生危險。
系統工作流程如圖4所示。
2 各模塊設計
2.1 車輛檢測模塊
車輛檢測模塊主要用于檢測車位上方是否已有車輛停放。目前停車場一般采用超聲波探測器或車輛探測器來進行檢測。
超聲波探測器工作原理:在停車場上方安裝超聲波探測器,由上向下發射超聲波,對從地面或車輛上反射回來的反射波的區別,通過處理器進行分析,從而做出有無車輛的判斷,并輸出相關信號。
車輛檢測器工作原理:在室外停車場停車處地面下方埋放地感線圈,對線圈上方有車或無車時的電感量的區別,通過車輛檢測器的處理器進行分析,并輸出相關信號。
超聲波探測器在室外使用時受其它聲源干擾較大,而且本方案在聲源定位模塊和障礙物檢測模塊均使用了超聲波,因此在此處采用車輛檢測器。車輛檢測器輸出車位是否被占用的信號給停車場主控中心,由停車場主控中心根據預定的車位分配方案分配要停入的車位,得到要停入車位的坐標信息。
2.2 聲源定位模塊
聲源定位模塊用來實時檢測聲源的位置,得到車輛的坐標信息。
移動聲源:在車輛的頂部安裝超聲波發生器。鑒于系統工作環境復雜,聲波頻率多而雜,若使用頻率較低的聲波極易受到干擾,造成車輛坐標檢測錯誤。因此,選用超聲下的高頻段頻率40 kHz,提高系統的抗干擾能力。在發射聲波的同時發射無線電信號,通知停車場主控中心,以開始計時。
由于聲源定位模塊發射的信號為超聲波信號,且整個系統是完全協同工作的模式,為了降低系統的復雜度與系統可實現性,可采用比較傳統的時延估計方法,即利用車輛發送超聲波信號的同時發出無線電信號,告知停車場主控中心,停車場主控中心及時打開定時器,當主控中心判定收到聲波信號時關閉定時器,然后計算兩者的差值△t,即可獲得時延估計值。
超聲波發射的時間間隔:需要注意超聲波發射時間間隔T的選擇。由于超聲波和無線電信號是同時發出的,如果時間間隔T太小,則會導致接收器在接收到聲波信號之前又接收到下一次發射的無線電信號,導致無法測量聲源的位置;如果時間間隔T太大,則在一定時間內對距離的測量次數過少,所測的結果實時性差。本停車場的對角線長不超過60 m,可得超聲波最大傳播時間tmax為:
其中,v0為聲波在空氣中傳播的速度,約為340 m/s。故,時間間隔T應取:T≥tmax。
在一定范圍內,時間間隔應越小越好,以增強檢測的實時性,故取時間間隔T為tmax。
考慮系統本身的要求,本方案采用了二維的定位方法。假設移動聲源的初始位置在S點,由時延估算法可以得到SA和SB的值,AB的距離在停車場設計時已經規劃好,為已知量。通過下面的算法可以得到小車在平面直角坐標系XOY中的坐標:
2.3 障礙物檢測模塊
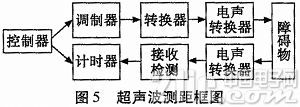
障礙物檢測模塊用來檢測車輛前方或后方是否有障礙物,比如前后駛來的車輛等。在車的最前端中央和最后端中央分別安裝超聲波發射接收裝置,通過超聲波發射裝置發出超聲波,根據接收器接收到超聲波的時間差就可以得到障礙物的距離。超聲波發射器向某一方向發射超聲波,在發射時刻同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。根據計時器記錄的時間t,就可以計算出車輛距障礙物的距離S:
超聲波測距框圖如圖5所示。
需要注意的是此超聲波的頻率不能和車頂部用來定位用的超聲波頻率相同,否則會引起干擾,發射的時間間隔也需特別注意。
2.4 車輛運行自動控制模塊
車輛運行自動控制模塊用來規劃自動泊車路徑,制定車輛運動策略,將車輛驅動到目標停車位。
最小轉彎半徑是指:當轉向盤轉到極限位置,汽車以最低穩定車速轉向行駛時,外側轉向輪的中心平面在支承平面上滾過的軌跡圓半徑。它在很大程度上表征了汽車能夠通過狹窄彎曲地帶或繞過不可越過的障礙物的能力。轉彎半徑越小,汽車的機動性能越好。假設車輛的最小轉彎半徑為Rmin,當車輛在道路上轉彎時,均以此最小轉彎半徑來執行,以降低對停車場空間的要求。
為了保證車輛準確沿著直線運動,需要使用慣性導航儀的反饋來實現轉向輪的方向校正;車輛的位置可由聲源定位模塊實時檢測并傳給車輛內的自動運行控制器;最后,使用步進電機分別控制車輛的方向盤、油門、剎車來控制車輛的運動、停止、加速、減速。自動泊車過程中,需要不斷監視車的情況,在車輛的前后中央處分別安裝超聲波發射接收裝置,來實時測定車輛的前部和后部與可能出現的障礙物的距離,一旦出現意外情況,車輛運行控制器可以立刻控制車輛停止,避免發生危險。
車輛運行控制器接收到主控中心傳來的目標車位坐標和車輛所處的坐標后,結合停車場的車位、道路、環境等預知的實際情況,規劃出泊車路徑,制定泊車策略,控制車輛的前進、后退、油門、轉彎、剎車等,使車輛最終停入目標車位。
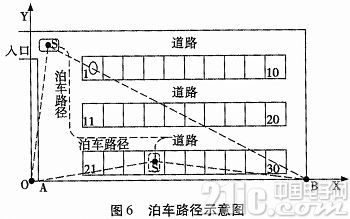
車輛轉彎時可控制步進電機將方向盤打到最大位置,以最小轉彎半徑轉彎。本方案設計的車輛停入車位的過程屬于車輛行駛方向與車位垂直的情況,倒車入車位的步驟可總結如下:
1)控制車輛向前駛過停車位,使自己的車輛中心處與要停入的車位中心在X軸上的距離為最小轉向半徑;
2)原地將方向盤往相反方向打到最大位置,慢速后退,直至車輛方向與車位方向平行;
3)回正方向盤,讓車平行后退,直至到達目標位置。
假設目標車位為24號車位,可做如圖6所示的路徑規劃:
最后,由車輛運行控制器來控制車輛的泊車過程,直至泊車入位。在泊車過程中,一旦遇到意外情況(例如前方或后方又駛來一輛車),車輛運行控制器可根據車輛前后中央安裝的超聲波發射接收裝置探測到的距離信息立刻控制車輛停止,避免發生危險。
3 結束語
本文從原理層面設計了聲定位自動泊車系統的工作過程,為自動泊車系統的工程實現提供了思路。本方案具有以下特點:
1)本方案集傳感器技術、自動控制、數據處理等多種高技術于一體。設計合理,且可以實時檢測障礙物,避免發生危險;
2)本方案采用超聲波和平面直角坐標系定位,給出了位置標定的一種新方法;
3)本方案中還可以在小車周圍安裝超聲波傳感器或攝像頭以及其他裝置來在野外環境(非專門停車場環境)下,尋找足夠的空間來當作停車車位,實現自動泊車。





評論