基于LabVIEW的氣體微流量測量虛擬儀器的開發

在真空技術應用中,氣體微流量由氣體微流量計測量。精確測量氣體微流量(或漏率)具有十分重要的意義。例如,為了保持飛船艙內的壓力長期工作正常,需要對艙體進行檢漏,檢漏時不但要找到漏孔位置,還要精確測量微小的漏率,這對于長期在空間飛行的載人飛船尤為重要;火箭燃料是易燃、易爆、有毒的氣體或液體,微小的泄漏具有很大的危險性,要對火箭燃料的加注過程和發射陣地進行安全檢測;在電子工業中的半導體元件、集成電路、計算機芯片的生產工藝中,要求精確控制氣體微流量的注入,以保證工藝質量和產品性能的穩定。為了滿足以上需求,研制測量精度和可靠性更高、測量范圍更寬、測量界面直觀、自動化程度高的氣體微流量計是非常必要的。利用虛擬儀器技術構建的氣體微流量測量虛擬儀器系統就是為了實現上述目標而進行的研究探索。
本文引用地址:http://www.104case.com/article/201610/308789.htm實現氣體微流量測量的虛擬儀器系統的建立
氣體微流量的測量原理
氣體微流量的測量原理是:當氣體流出其變容室時,伺服電機通過平動機構驅動活塞在油室中水平運動,活塞運動會改變其在油室中的體積,而液壓油的體積是基本不變的,這樣波紋管就受到力的作用而發生形變,使其內的氣體壓力保持恒定,氣體在Tr溫度(Tr一般取23℃)下的流量Q通過測量變容室內氣體的壓力p、溫度T和體積變化率dV/dt后由公式(1)計算得到。

由式(1)可知,測量流量時,不但要準確地測量出變容室內氣體的壓力、體積變化率和溫度,還要在測量過程中控制變容室內氣體的壓力,使其恒定。
虛擬儀器的硬件結構
硬件及功能描述:
本著“提高測量精度和自動化程度,減小測量不確定度”的原則,設計了一套以工控機為中心的測量與控制系統,選用了精度較高的測量工具,并用多塊數據采集卡把各測量工具與控制器件聯系在一起,實現了數據自動采集和恒壓自動調節功能。硬件總體結構如圖1所示。
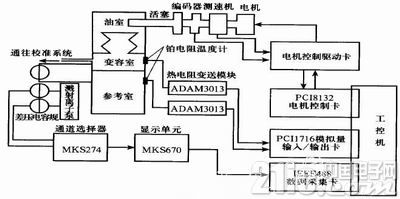
圖1 硬件總體結構圖
采用3個Pt100鉑電阻溫度傳感器、3個ADAM3013熱電阻變送模塊及1塊PCI-1716多功能數據采集卡可實現對變容室、參考室及實驗室溫度同時進行采集。溫度的測量范圍為0~100℃,精度為0.1℃。
采用美國MKS公司生產的一套差壓式電容薄膜規(包括三個規頭、一個控制單元MKS274和一個數據顯示單元MKS670,MKS670上有一個488接口,計算機通過IEEE488數據采集卡進行量程和規頭選擇)、美國NI公司生產的IEEE488數據采集卡實現氣體壓力的測量。壓力的測量范圍為0~1.01×105Pa。
利用臺灣凌華公司生產的運動控制卡PCI-8132、伺服控制卡和位置控制卡、平動機構(主要包括選用北京微電機總廠生產的70LC-1型永磁式直流力矩測速機組、型號為HES-10242MD脈沖編碼器、絲杠、θ5的活塞)等實現對伺服電機進行速度和位置控制(伺服控制結構簡圖見圖2)。絲杠導程2mm,精度為0.001mm,是位移測量的基準。
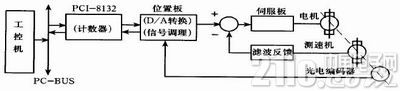
圖2 伺服控制結構簡圖
速度環的反饋信號取自測速發電機,反饋環節中加入濾波是為濾除低速時的諧波。位置環中位置傳感元件――光電編碼器將產生的電脈沖反饋給位置板經信號調理后給PCI-8132中的減法計數器,于是每來一個脈沖,計數器就從目標值減去1,直到計數器的內容為0,伺服電機轉到目標位置而停止旋轉。
恒壓控制原理:差壓式電容薄膜規、IEEE488數據采集卡、工控機、8132電機控制卡、位置/伺服控制卡、電機、導軌平動機構、活塞、液壓油和波紋管共同組成了一個負反饋恒壓自動調節的閉環控制系統。在流量測量過程中,參考室內的氣體壓力不變,當有氣體流出變容室時,引起變容室的壓力發生變化,在變容室與參考室之間產生壓差△p,計算機循環檢測這一壓差信號。計算機根據壓差值△p的大小,采用預先設定的控制算法計算出相應的電機轉速調整量,并輸出到位置控制卡,使電機驅動卡根據該電壓信號重新驅動伺服電機,使伺服電機的轉速得到了調整。電機驅動活塞在油室中運動,改變變容室的容積,使變容室與參考室之間的差壓值△p維持在零附近,使得變容室的壓力p基本上保持恒定。
系統的控制算法
本系統采用時間最優(B-B控制)與積分分離PID控制的雙模控制算法。時間最優控制可加快調節的作用,而PID控制則保證跟蹤精確度與穩態誤差滿足要求。時間最優控制模式為
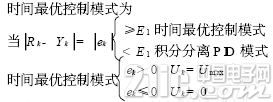
式中:E1為時間最優控制偏差門限;Rk,Yk,ek,Uk為第k次采樣時的設定值、檢測值、偏差值、計算機輸出值;Umax為計算機輸出的最大值。
積分分離式PID控制可以增強抗積分飽和功能,防止超調和振蕩。其基本思想是:當偏差較大時,取消積分作用,只進行PD調節。只有當偏差在某范圍內時,才加入積分作用,進行PID調節,其控制方程可導出為
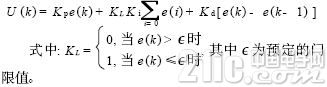
Kp,Ki,Kd分別為控制器的比例、積分、微分系數;E為積分作用門限值,其值需根據控制精度在調試時最后確定。
虛擬儀器的軟件設計及實現
系統軟件采用模塊化設計,可將不同測量內容設計成單獨的功能模塊。由主界面程序構成結構框架,各子模塊分別完成一定的功能,在主界面程序或其它的子程序中調用。各功能模塊間的獨立性較強,一般都可單獨調試、修改和移植。所以整個系統軟件層次清晰、易于理解、便于修改、利于開發新功能。系統軟件由氣體壓力的數據采集模塊、溫度的數據采集模塊、活塞位移的數據采集模塊、電機驅動和轉速控制模塊、壓力補償程序模塊、測量數據的存貯和顯示模塊組成。圖3為采用LabVIEW6.1開發的氣體微流量測量虛擬儀器主界面。

圖3 氣體微流量測量虛擬儀器主界面
不確定度分析
整個儀器的不確定度由以下部分合成,現分別闡述。
壓力的測量不確定度
壓力由電容薄膜規測量。根據國防科工委真空計量一級站對電容薄膜規的校準結果,壓力測量的不確定度為0.8%。
活塞位移和時間的測量不確定度
位移由編碼器測量。編碼器每輸出4096個脈沖,活塞前進2mm,其分辨力為0.5μm。流量測量中活塞的最大行程為36mm(對應73728個脈沖)。將活塞移動位移設定為73728個脈沖(即36mm),測量編碼器實際輸出的脈沖數為73726。由測量結果可知,活塞位移的測量不確定度為△L/L=(2×2)/(4096×36)=0.0027%時間的測量直接取自工控機的時鐘,其精度為0.001.s。在測量流量時,流量的有效測量時間大于100s。這樣,時間測量的不確定度小于0.001%。
變容室溫度的測量不確定度
Pt100鉑電阻溫度傳感器的測量精度為0.1K,實驗室的溫度約為23℃,則溫度測量的不確定度約為0.04%。
恒壓控制效果
在參考室中充入104175Pa的N2,設置好各PID控制參數,通過小孔將流量引入雙球校準系統,進行恒壓調節。圖4為PID調節結果。
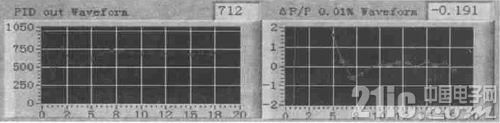
圖4 恒壓控制效果圖
由PID調節結果中知,變容室和參考室之間的壓力差被控制到變容室壓力的±0.004%之內,加上參考室內氣體壓力的靜態波動(約為0.005%)后,變容室內氣體壓力的波動約為0.0.%。從以上的實驗結果可知,整個流量計的相對合成標準不確定度為

該不確定度遠小于流量計的設計指標(2%)。
結束語
在該系統的設計中,通過選用高精度的測量元件和先進的測控方法,提高了流量的測量精度,延伸了流量的測量下限。虛擬儀器技術的應用,使氣體微流量測量系統具有人性化的操作界面與易于操作的特點,提高了該系統的自動化程度、可靠性和維護性。






評論