基于單片機帶溫度補償的超聲波測距儀設計

超聲波具有指向性強,能量消耗緩慢,在介質中傳播的距離較遠等優點,因而超聲波經常用于距離的測量,如物位測量儀和測距儀等都可以通過超聲波來實現。利用超聲波檢測比較快速、方便、計算簡單、易于實時控制,并在測量精度方面能達到工業實用的要求,性價比較高。因此在液位、井深、管道長度的測量、移動機器人定位和避障等領域得到了廣泛應用。
本文引用地址:http://www.104case.com/article/201610/308694.htm本設計以脈沖回波法的超聲波測距原理為依據,AT89S52單片機作為控制核心,結合超聲波發送和接收模塊HY—SRF05,實時LCD顯示。系統采用DS18B20溫度傳感器,把溫度值的變化補償到超聲波的波速中,從而提高超聲波測距儀的精度,降低溫度對測距結果的影響。
1 超聲波測距原理
超聲波測距的原理是通過超聲波發射裝置發出超聲波,根據接收器接到超聲波時的時間差就可判斷出距離,這與雷達測距原理相似。超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物則立即返回,超聲波接收器收到反射波則停止計時。
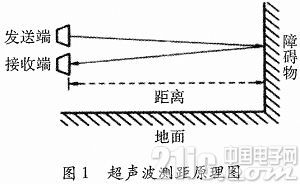
根據計時器記錄的時間t,就可以計算出發射點距障礙物的距離
d=s/2=(V×t)/2 (1)
V=331.4+0.61T (2)
其中,s是超聲波往返通過的路程;V為超聲波介質中傳播速度;T為實際溫度。所以超聲波傳播速度和溫度密切相關,由此可見溫度對于超聲波測距系統的影響是不可忽略的。
2 系統硬件設計
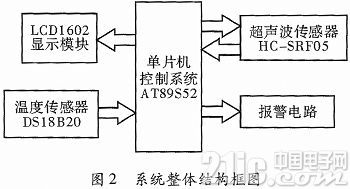
該系統由5部分組成,以AT89S52單片機作為控制核心,溫度傳感器DS18B20用于溫度的采集,LCD用于顯示實時溫度和障礙物的距離,超聲波傳感器HC-SRF05用于超聲波的發送和接收。系統整體結構框圖如圖2所示。
2.1 超聲波傳感器
超聲波傳感器HC-SRF05集超聲波的發送和接收功能于一體,可提供2~450 cm的非接觸式距離感測功能。圖3是HC—SRF05的實物圖,圖4是超聲波模塊電路圖。1腳為5 V電源端;2腳為觸發控制的信號輸入端,與單片機的P3.7口相連;3腳為回響信號輸出,與單片機P3.2口相連;4腳接地;5腳為開關量輸出。
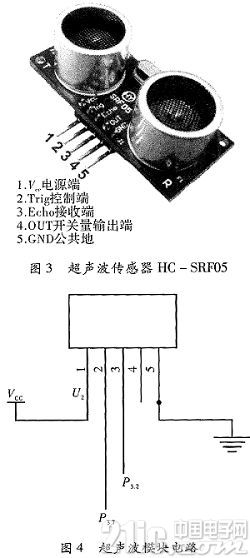
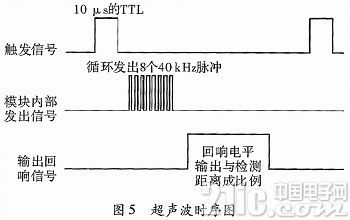
P3.7口向觸發引腳發送≥10μs的脈沖觸發信號,該模塊內部將發出8個40 kHz周期電平并檢測回波,一旦檢測到有回波信號,則3腳輸出回響信號,所測的距離與回響信號的脈沖寬度成正比,由此可通過發射信號到收到回響信號的時間間隔計算得到距離。超聲波時序圖如圖5所示。
2.2 溫度傳感器DS18B20
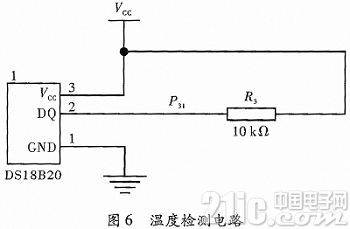
由于聲音的速度在不同的溫度下有所不同,因此為提高精度,應通過溫度補償對超聲波的傳播速度進行校正。系統采用DS18B20傳感器測量溫度,DS18B20溫度傳感器具有不受外界干擾、精度高、測溫范圍寬等優點。檢測電路如圖6所示,單片機P3.7口接DS18B20數據總線,控制DS18B20進行溫度轉換和傳輸數據,數據總線接10 kΩ的上拉電阻,作用是使總線控制器在溫度轉換期間無需一直保持高電平。
2.3 LCD顯示模塊
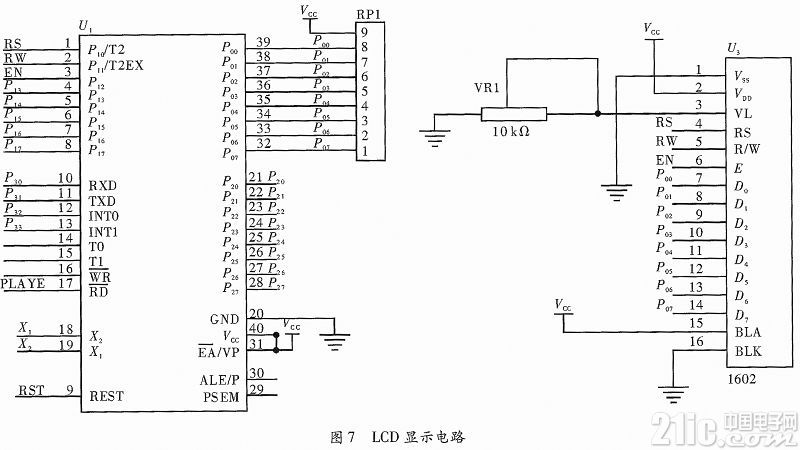
LCD1602具有超薄、功耗低、體積小等優點,被廣泛用于低功耗電子產品和智能儀表中。LCD顯示電路如圖7所示,3腳VL為對比度調整端,使用時通過接一個10 kΩ的電阻來調節。4腳RS為寄存器選擇信號線,H為數據選擇,L為指令選擇,接單片機的P1.0口。5腳RW為讀寫信號線,接單片機的P1.1口。6腳E為使能端,當E由高電平跳變為低電平時執行命令,接單片機的P1.2口,8位數據線D0~D7,接單片機的P0口。
3 系統軟件設計
3.1 主程序設計
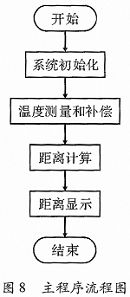
系統軟件采用模塊化設計,系統初始化部分包括引腳的定義、中斷和定時器的設置等,進而調用溫度檢測子程序,根據溫度值對超聲波速度進行校準,最終根據回波信號計算距離并顯示,主程序流程如圖8所示。
3.2 超聲波測距子程序
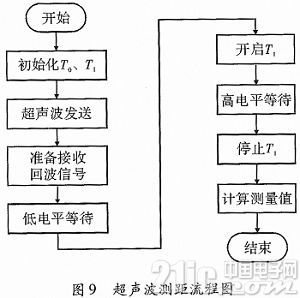
超聲波發送子程序采用定時器T0中斷的方式由單片機P3.7引腳發送觸發脈沖,由單片機P3.2引腳利用定時器T1來對回波信號進行檢測計時,初始化T1后檢測等待回波信號的到來,當信號由低變高后定時器T1開始計時,直到信號由高到低計時結束,根據溫度校準后的超聲波速度計算障礙物的距離,超聲波測距流程如圖9所示。
4 實驗結果
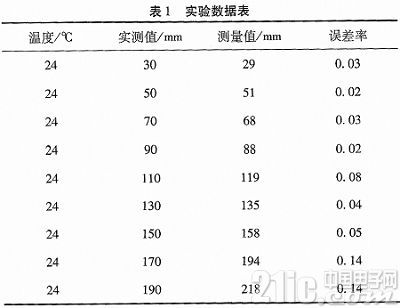
硬件電路如圖10所示,經過試驗采集的數據如表1所示。由表1數據可看出,當測量范圍在30~150 mm之間時,誤差相對較小,此范圍之外誤差較大。
5 結束語
本系統通過引入DS18B20,使超聲波測距系統的測量精度有了較大的提高。該系統具有結構簡單、帶溫度補償、實時LCD顯示和報警等優點,并有一定的實用價值。












評論