基于UHF RFID技術的室內(nèi)定位系統(tǒng)設計

引言
本文引用地址:http://www.104case.com/article/201610/308669.htm近些年,物聯(lián)網(wǎng)的興起為我們的生活帶來了極大的便利。利用局部網(wǎng)絡或互聯(lián)網(wǎng)等通信技術把傳感器、控制器、機器、人員和物品等通過新的方式連在一起,實現(xiàn)信息化、遠程管理控制和智能化的網(wǎng)絡。現(xiàn)階段物聯(lián)網(wǎng)的應用大多在室內(nèi),而物體位置感知作為物聯(lián)網(wǎng)中很重要的組成部分之一,卻無法通過傳統(tǒng)的衛(wèi)星和蜂窩定位來獲取。無源超高頻RFID室內(nèi)定位作為室內(nèi)無線定位技術之一,正得到快速發(fā)展,然而,RFID標簽定位依然存在諸多問題亟需解決。
在傳統(tǒng)的無線傳感器網(wǎng)絡中,基于測距的定位方法主要依賴的測量參數(shù)包括時間、能量和角度,然而對于RFID系統(tǒng),帶寬的限制使其無法使用時間法和角度法,使用能量法得到的測距結果精度太差。考慮到RFID系統(tǒng)的特點,其信號的發(fā)送載波是一個單頻信號,可以通過提取載波相位來獲取相位變化差,由此獲取距離信息。本文通過對Impinj R420讀寫器設備進行二次開發(fā)獲取載波相位,并使用基于Impinj的Indy R1000開發(fā)板獲取能量信息,將相位法和能量法得到的距離分別運用到定位上,通過算法優(yōu)化最終進行定位,并證明了相位法測距定位在室內(nèi)小環(huán)境定位中的優(yōu)越性。
1 系統(tǒng)總體結構
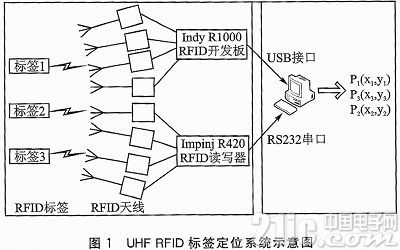
UHF RFID室內(nèi)定位系統(tǒng)通過獲取距離測量信息來定位待測物體坐標,故系統(tǒng)主要分為兩部分:測距部分和定位部分。距離信息的獲取主要涉及到兩個參數(shù):RFID信號傳輸過程中的能量衰減和載波信號相位的變化值。其中能量信息通過R1000開發(fā)板來獲得,相位信息通過Impinj R420讀寫器來獲得。將獲得的參數(shù)信號傳入PC,通過定位算法來確定RFID標簽的位置。整個定位系統(tǒng)結構如圖1所示。
2 UHF RFID標簽系統(tǒng)測距部分
RFID標簽是產(chǎn)品電子代碼(EPC)的物理載體,附著于可跟蹤的物品上,可全球流通,并對其進行識別和讀寫。ISO18000—6協(xié)議對UHF RFID通信作出了詳細的規(guī)定,我們使用中國大陸UHF RFID的工作頻段920~ 925MHz進行標簽定位實驗。
2.1 UHF RFID工作原理
讀卡器和標簽的通信是基于ITF(Interrogator Talk First,閱讀器先發(fā)言)機制的,即基于讀寫器的命令與讀寫器的回答之間交替發(fā)送的半雙工機制。讀卡器和標簽完整的通信過程如下:讀卡器首先向標簽發(fā)送一個Query命令,解調(diào)出該命令的標簽隨即進入確認狀態(tài),此時標簽將向讀卡器反向反射一個16位的隨機數(shù)RN16,讀卡器將發(fā)送包含相同RN16的ACK信號給標簽,若標簽接收到的ACK信號包含的RN16信息與之前發(fā)送的RN16信息相同,則標簽轉入確認狀態(tài),并反向散射PC+EPC+CRC16信息給讀卡器。在通信過程中提取能量和相位的變化值進行測距。
2.2 能量法測距原理及硬件結構
經(jīng)過傳播路徑損耗,接收端接收到的信號功率PRX(dBm),可以通過信號傳輸公式得到:
其中,PTX是閱讀器發(fā)射功率;Greader和Gtag分別是閱讀器和標簽的天線增益;Lsys是系統(tǒng)內(nèi)部電路損耗,在讀寫器發(fā)送信號時,發(fā)送功率可以人為設置,Lsys。可以通過反饋線接上衰減器將信號輸入頻譜儀,觀察衰減情況。當信號經(jīng)過標簽反射時,讀寫器接收反射信號并測出PRX,這樣就可以計算出路徑損耗LP(d),根據(jù)Friss公式便可以計算出信號傳播路徑。
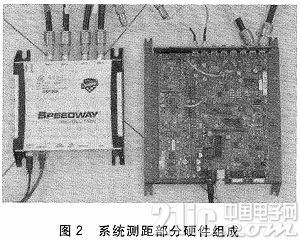
能量信息主要通過基于射頻芯片Indy R1000開發(fā)板測量得到,如圖2右側所示,R1000使用EPCglobal超高頻第一級(Class 1)第二代標準和ISO18000—6標準,傳輸調(diào)制模式有DSB、SSB、PR—ASK三種,工作頻率為840~960 MHz。R1000采用了56引腳8 mm2QFN封裝格式,集成了大約100個元件,負責傳送、調(diào)制、接收、處理這些來自EPC Gen2電子標簽的無線電通信信息。
R1000內(nèi)包含了一個能源擴大器,使得它可以在近距離或者2 m內(nèi)對標簽進行編碼和閱讀,如果有外接能源擴大器,則使用R1000的讀寫范圍可以達到10 m以上。在開發(fā)板中,R1000和單獨的MCU連接,MCU將R1000數(shù)字信息處理器產(chǎn)生的原始數(shù)據(jù)轉換成EPC或者ISO18000—6格式的代碼。
2.3 相位法測距原理及硬件結構
對于相位信息的測量,信號傳播的距離與相位變化的公式為:
d=(φ·c)/(2πf) (2)
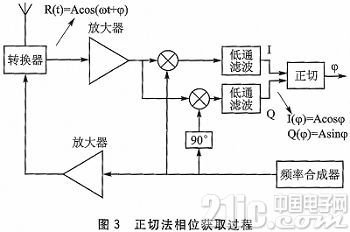
相位獲取過程如圖3所示。由于使用的RFID頻段工作在900 MHz頻段上,信號在載波相位一個2π周期變化內(nèi)所傳播的距離很短。在實際測量時,無法知道相位變化了多少個周期,這樣就會產(chǎn)生相位模糊問題,因此使用相位差測距法。
選取兩個頻率相近的載波f1和f2,載波初始相位為φ1,b和φ2,b,閱讀器接收信號時載波最終相位分別為φ1,e和φ2,e。對于載波f1,相位變化值為△φ1=(φ1,e-φ1,b),對于載波f2,相位變化值為△φ2=(φ2,e-φ2,b);則在相位差測距法中,距離d為:
d=(△φ11-△φ2)·c/[4π(f1-f2)] (3)
圖2左側為Impinj R420讀寫器,通過其獲取相位信息。R420核心射頻芯片為Indy R2000,為R1000的升級版,不僅支持EPCglobal標準和ISO18000—6標準,而且可以配置其他協(xié)議。R2000采用64引腳9 mm2 QFN封裝,在功耗和接收靈敏度方面比R1000有所提高。芯片內(nèi)部結構如圖4所示。
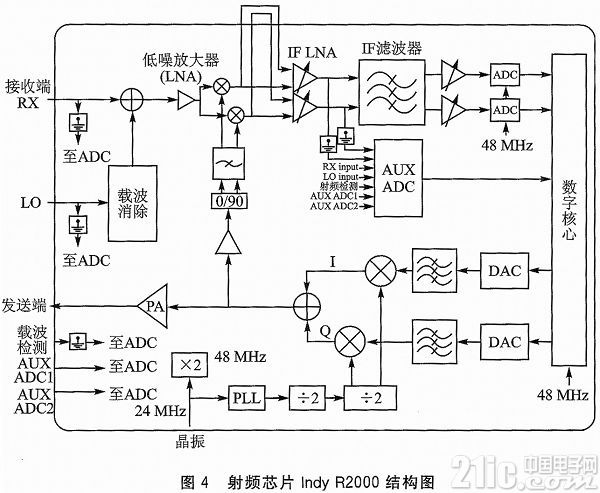
數(shù)字核心選擇好載頻點后,輸出信號,經(jīng)過DAC和頻率選擇濾波器,形成I/Q兩路信號。與載波相混后兩路信號疊加,再經(jīng)功放發(fā)送出去。當芯片接收到信號時,與載波相加,過低噪放大器后與發(fā)送信號相混,通過頻率選擇濾波器和頻選放大器獲取基帶信號,通過ADC將信號送至數(shù)字核心。
雖然Indy R2000的底層射頻協(xié)議(LLRP)中包含載波相位的提取,但其自帶的軟件并不讀取這一部分信息,因此,需要借助Impinj公司的二次開發(fā)包OctaneSDK來獲得載波相位值。
3 UHF RFID標簽系統(tǒng)定位部分
通過系統(tǒng)測距部分,獲得了標簽到閱讀器天線之間的距離,將通過線性化最小二乘法和加權殘差法求出標簽位置。
3. 1 線性化最小二乘法
假設定位環(huán)境有N個位置已知天線Xn(xn,yn),i=1,2,…,N,位置未知的標簽為P(x,y)。閱讀器對天線進行測量,共有N個測量方程,en為測量誤差:
3.2 加權殘差定位方法
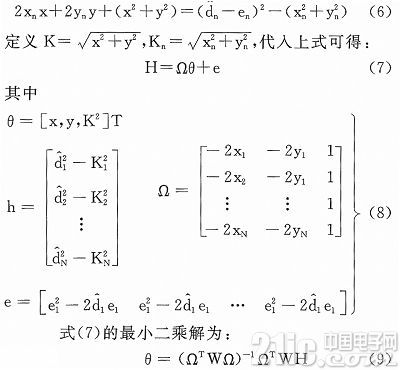
在測量過程中,會出現(xiàn)部分測量數(shù)據(jù)不準確的問題,并造成整體定位誤差較大。引入加權殘差方法,通過對測量方程增加權值,將較大誤差的處理轉換成權值的選擇,最終完成標簽定位。定義標簽坐標P的殘差平方和為:
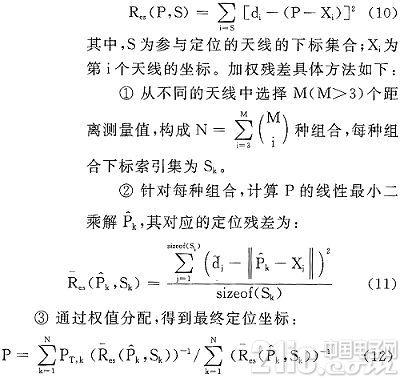
4 系統(tǒng)測試結果
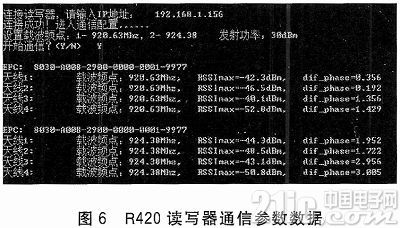
選擇一塊3 m×3 m的正方形區(qū)域,如圖5所示。天線使用Larid公司右相圓極化遠場天線S9028PCR,最大增益為9 dBic,回波損耗為18 dB。將4組天線放置在4個頂點,每組天線上有2個天線,分別連接到Indy R1000開發(fā)板和R420上,標簽隨機放置在正方形區(qū)域內(nèi),設置閱讀器發(fā)送信號功率為30 dBm,載頻點為920.63 MHz和924.38 MHz,使得信號載波在這兩個頻點上不斷變換。打開軟件,開始進行測試。隨機在測量區(qū)域內(nèi)選取4個位置放置UHF RFID標簽,通過四周的天線與閱讀器進行通信。
在足夠長的一段通信過程中,如圖6所示,通過軟件獲取這段時間內(nèi)閱讀器接收到的最大的RSSI值和相位值變化的平均值,經(jīng)過處理計算,得到標簽坐標。
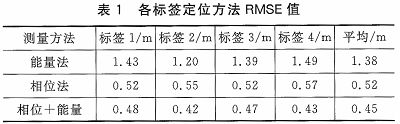
我們定義系統(tǒng)的均方根誤差(RMSE)來衡量系統(tǒng)定位精度。RMSE的定義式如下所示:
(x0,y0)為標簽的真實坐標。表1顯示了分別用不同的測距數(shù)據(jù)得到的定位誤差。
結語
本文通過對UHF RFID標簽通信過程中相位和能量的提取,完成了室內(nèi)定位系統(tǒng)。可以看出在小環(huán)境中,使用相位法進行定位比傳統(tǒng)的使用能量法進行定位精度要提高很多。但是在復雜室內(nèi)環(huán)境下,相位法定位會受到很大的影響,在后續(xù)工作中,可以在定位算法上改進,來彌補由于測距不準產(chǎn)生的誤差對最終定位產(chǎn)生的影響。






評論