基于S7―200PLC的機械手運動控制

摘要:基于S7—200PLC村機械于的運動進行一系列控制,這些運動包括手臂上下、左右直線運動,手腕旋轉運動,手爪夾緊動作和機械手整體旋轉運動等。所采用的動力機構是步進電機,能夠做到精確控制。在多個行程開關傳感器的保護下,保證了這些運動萬無一失。
本文引用地址:http://www.104case.com/article/201610/306783.htm0 引言
工業機械手(以下簡稱機械手)是近代自動控制領域中出現的一項新技術,并已成為現代制造生產系統中的一個重要組成部分,越來越多地被研究和應用。本設汁的控制系統采用小型可編程控制器S7—200PLC,具有編程簡單、修改容易、可靠性高等優點。
1 機械手的選擇
根據古典力學的觀點,物體在三維空間內的靜止位置是由三個坐標或圍繞三軸旋轉的角度來決定的。因此,物體的位置和方向(即關節的角度)能從理論上求得。在實際生產生活中,機械手的自由度不是盲目模仿人手的動作來確定的,而是根據實際需要的動作,設計出最少自由度的機械手來滿足作業要求。所以一般專用機械手(不包括握緊動作)通常只具有2~3個自由度。而通用機械手則一般取4~5個自由度。本設計采用的機械手共有5個自由度。
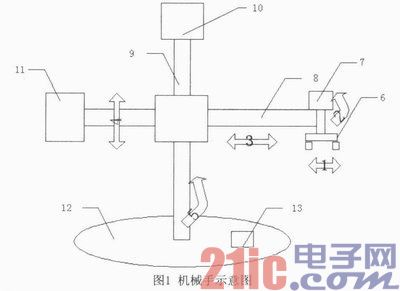
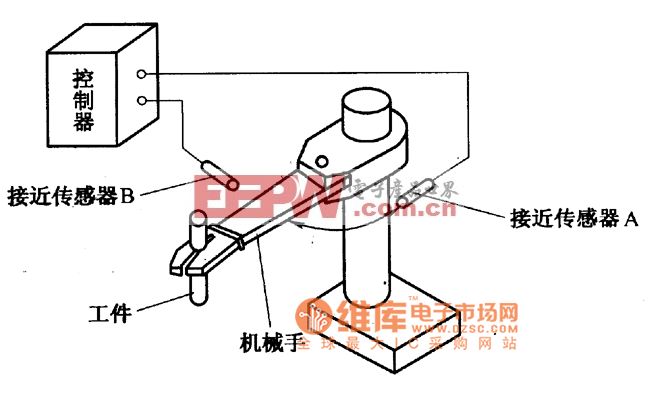
這五個自由度為機械手能夠做出手臂伸縮、手臂上下擺動、手臂左右擺動、手腕回轉、手指抓緊,該機械手示意圖如圖1所示。
2 動力裝置的選擇
工業機械手要求精度非常高,所以本設計采用的是步進電機,步進電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數宋控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。
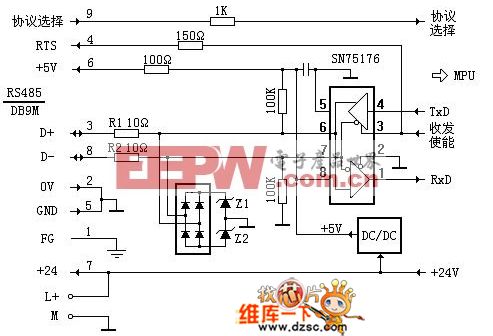
不過步進電機需要在驅動器的作用下才能正常工作,所以還要選擇驅動器,本設計選擇的是價格便宜而又方便使用的中美合資SH系列步進電動機驅動器,主要由電源輸入部分、信號輸入部分、輸出部分等,實物圖和接線原理圖分別如圖2和圖3所示。
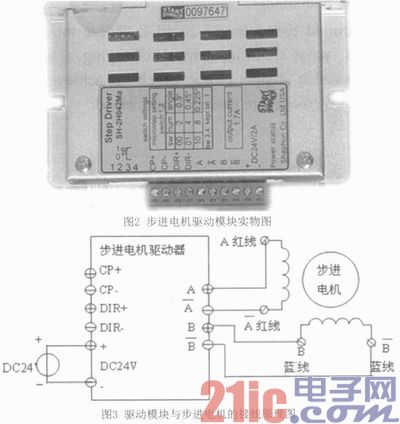
電源輸入部分:由電源模塊提供,用兩根導線連接,注意極性。
信號輸入部分:信號源由PTO主機提供。由于PTO提供的電平為24V,輸入部分的電平為5V,中間加了保護電路。
輸出部分:與步進電動機連接,注意相序。
3 傳感器的使用
采用近位開關作為手爪旋轉和底盤旋轉眼位檢測用;采用限位開關,作為橫軸、縱軸限位檢測用。
近位開關:有3根連接線(紅、藍、黑),紅色接電源正極、黑色接電源負極、藍色為輸出信號,當與擋塊接近時輸出電平為低電平,否則為高電平。
選用型號:ASL-300Q(磁感應式320),其結構原理如圖4所示。
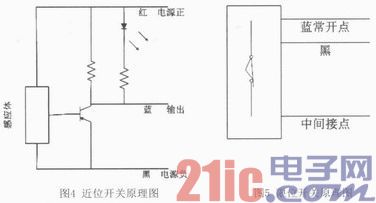
限位開關:當擋塊碰到限位開關時動作(常開點閉合),選用型號:ASL-300M(機械式310),其結構如原理圖5所示。
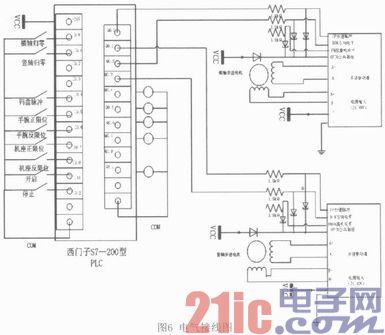
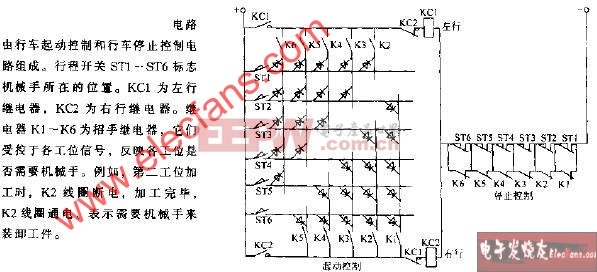
4 電氣接線圖
電氣接線圖如圖6所示。
5 控制流程設計
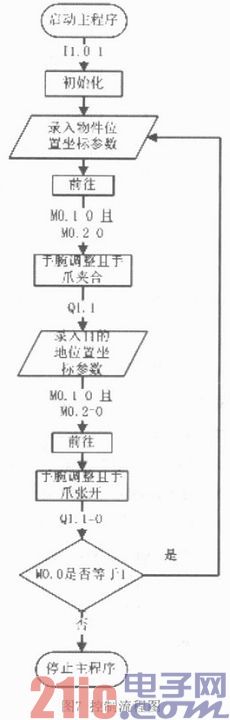
本次設計為空間內兩點間的物件循環搬運動作。具體控制流程如下:開啟PLC,如果機械手不在初試位置上,步進電機開始運轉(M軸向手爪方向移動,豎軸向下移動),機座伺服電機反向旋轉到零刻度位置。初始化完成后,首先載入物件所在位置在柱面坐標系下對應的脈沖數,橫軸、豎軸步進電機和機座伺服電機同時工作,橫軸向前伸,豎軸向上升,機座正轉;當步進電機因脈沖輸完而中斷停止,伺服電機伸到位后,手腕電動機得電帶動手腕反向旋轉;當傳感器檢測到限位磁頭時,電動機停止,PLC控制電磁閥動作,手爪夾緊,延時一段時間后,然后載入目的地所在位置在柱面坐標系下對應的脈沖數,橫軸、豎軸步進電機和機座伺服電機同時工作,返回到物件所在位置;手腕電動機得電帶動手腕正向旋轉,電磁閥復位,手爪松開延時一段時間;最后判斷主程序開關狀態,若仍然開啟,則開始下一周期的搬運動作。控制流程圖見圖7所示。





評論