無人機載光電任務設備升降機構的控制器設計

摘要:介紹了無人機載光電任務設備升降機構的工作原理、結構組成及其控制器設計。控制器采用C8051F320單片機,驅動電路選用高集成度、高性價比、高可靠性和高效率的驅動芯片MSK4310實現。與傳統分立元件方法相比,簡化了80%的電路設計,節省了50%的結構尺寸。系統實現了光電任務設備的自主升降以及到位停止等自動控制功能。
本文引用地址:http://www.104case.com/article/201610/306629.htm保證了無人機在起飛、降落時其所配備光電任務設備的安全性。
無人機載光電任務設備升降機構是為了實現光電任務設備在特定空域自主升降而設計的。當無人機在巡航時,升降機構將光電設備降至合適的位置,保證其搜索、探測、識
別、跟蹤等功能的無障礙實現;當無人機在起飛和降落時,升降機構將光電設備升至無人機艙段內的安全位置,使其在受到較大沖擊時,免受損壞,保證其安全性;同時,當無人機不使用光電設備時,升降機構將其升起至機艙艙段內,也可以保證無人機飛行時的機體空氣動力學特性。因此,升降機構的可靠正常工作是光電任務設備完成任務使命和安全使用的前提,基于此,要求升降機構及其控制器安全系數高、可靠性好,同時為滿足無人機裝載條件,要求體積重量小。
1 升降機構簡介
升降機構為無人機載產品,機構實現遵循簡捷、適用、重量輕、體積小等原則,保證升降運動平穩自如、可靠安全。機構具有限位功能,在升降的任意位置有良好的自鎖功能。本文所控制的升降機構如圖1所示,選擇行星輪同步帶升降機構設計,升降機構由升降平臺和控制盒兩部分組成,控制盒置于平臺外側。升降平臺由三個薄壁框架、四根光桿及四根絲杠組成整體框架。其中第一層、第三層薄壁框架是固定框架,這兩層框架通過光桿及絲杠連接起來,支撐起整個升降平臺,兩層框架上均開有孔洞,保證光電設備的無障礙升降運動。第二層薄壁框架是活動框架,光電設備通過安裝螺栓固定在該層框架上,用電機通過同步齒形帶帶動絲杠轉動驅使活動框架上下運動來達到升降光電設備的目的。

2 控制器工作原理
控制器以單片機C8051F320為升降機構主控芯片,結合芯片MSK4310的功率放大作用,配合限位開關實現定點升降功能。
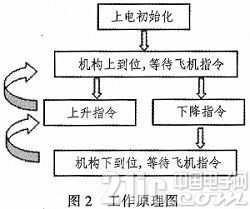
升降機構的工作原理是:當系統上電,升降機構初始化,上升至頂位,等待飛機發送控制指令。當飛機給出控制信號,系統自動判斷上升或者下降。同時判斷是否上到位或者下到位。到位后,給飛機返回到位指令。工作原理見圖2。
3 控制器硬件設計
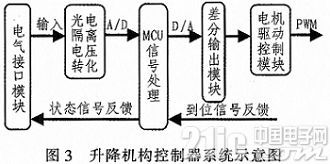
升降機構控制器主要由C8051單片機和MSK公司生產的驅動芯片MSK4310組成,主要包括電氣接口部分、光電隔離部分、數字信號處理模塊、差分輸出模塊、電機驅動控制模塊。飛機控制信號通過光耦器件PS2805轉化為單片機I/O口可以接受的3.3 V,單片機對輸入的數據進行算法處理,通過差分輸出模塊得到差分電壓信號給電機驅動控制模塊,生成相應PWM波輸出給電機。整個系統如圖3所示。
3.1 光電隔離
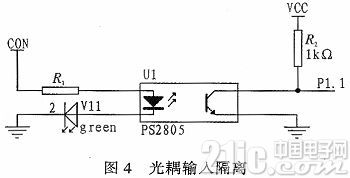
控制器在數字信號輸入級用到了光電隔離技術。在輸入級,由于單片機接收的控制信號為3.3 V,為了避免飛機給的高電壓控制信號CON損壞單片機I/O口,兩級之間加入光耦PS2805芯片,具體如圖4所示。
3.2 數字信號處理模塊
控制器數字信號處理模塊是以單片機C8051F320為主處理芯片MCU,實時采集飛控信號、到位信號等進行數據處理。單片機內集成了17通道模擬多路選擇器(AMUX0)和1個200 ksps的10位逐次逼近寄存器型ADC,ADC中集成了跟蹤保持電路和可編程窗口檢測器。MCU接收到控制信號高低電平時,P1.2口和P1.3口輸出相反電平,經過兩片LM193比較器進行電壓比較,形成差分輸出電壓信號,比較器后級接上拉電阻提高輸出驅動能力。
3.3 電機驅動控制模塊
傳統分立元件MOSFET搭建三相橋電路,不但結構尺寸較大,容易出現信號波形失真等情況,而且其外圍驅動電路復雜,還需加入硬件 HALL解碼或者在MCU內加入軟件HALL解碼。與其相比,MSK公司的驅動芯片MSK4310集成波形發生器電路、門驅動電路、HALL解碼電路、限流保護電路、速度環于一體,其結構緊湊、價格低廉、集成度高、可靠性好。電機驅動外圍電路如圖5所示。
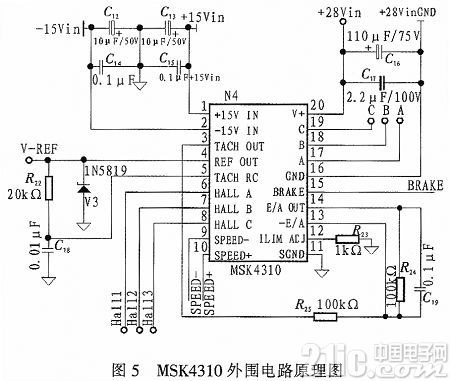
選用三相無刷直流電機為升降執行元件,通過接收A、B、C三相PWM波驅使電機正轉或者反轉,達到使負載上升下降的目的。電機采用制動器制動,制動器正常工作電壓為+24 V,當制動器掉電,電機呈現抱死狀態。系統在高速運行中突然出現電機抱死狀態,會出現硬力碰撞,從而傷害電機、損壞機構。為了避免上述情況,系統采用軟剎車功能,當CPU判斷到位時。先由CPU送BRAKE剎車信號給功率放大模塊,電機減速至停止,待電機停止之后,制動器斷電,電機緊緊抱死,設備被準確定位。采用這種控制策略,容易控制,安全性好,可靠性高。
4 控制器軟件設計
軟件采用C語言進行模塊化結構設計,主程序由時鐘初始化、I/O口初始化和主函數等構成。本著簡化程序復雜度,提高程序可靠度的原則,對程序源代碼進行了一層層的
優化。
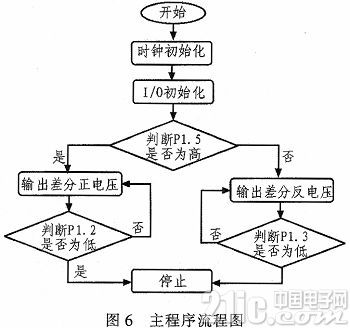
上電進行時鐘、I/O初始化,判斷單片機P1.5口是否為高電平,若為高說明收到上升指令,電機上升,然后判斷單片機P1.2口是否為低電平,若為低說明已經上到位,然后停止。反之亦然。圖6為系統程序流程圖。
5 試驗結果及結論
在室溫、負載25kg條件下,完成300次升降,記錄30組數據,如圖7所示。
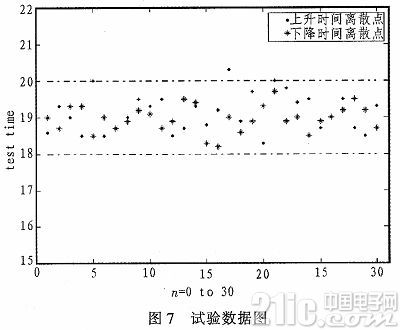
系統要求升降機構上升時間和下降時間小于等于20秒,通過試驗結果可以看出,機構運行時間準確性高,能夠準確完成系統的任務要求。同時機構性能穩定,上升下降平穩,控制器發熱量小。達到了預期的控制效果。控制器具有如下特點:
1)升降機構控制器采用MCU進行數字信號處理。單片機C8051成熟度高、可靠性好。
2)功率放大部分選用了集成度更高的MSK4310,與傳統分立元件相比,集成度更高、抗干擾能力更強、控制更容易、結構尺寸更小。
3)系統升降速率可以通過調整差分輸出模塊的特定電阻阻值調節分壓,進行無極線性調節,調節范圍為1 V到5 V,操作方便。
6 結論
通過實驗驗證,升降機構的行星輪同步帶設計保證了設備升降的平行性和穩定性,而升降機構控制器的設計極大提高了機構的自動化水平。本設計為升降機構高安全系數、高可靠性提供了保證,同時為無人機載設備小型化做出了貢獻。同時,這一設計適用于大多數三相電機的控制系統,有很強的實用價值。









評論