基于ARM的高分辨率壓電陶瓷驅(qū)動(dòng)電源

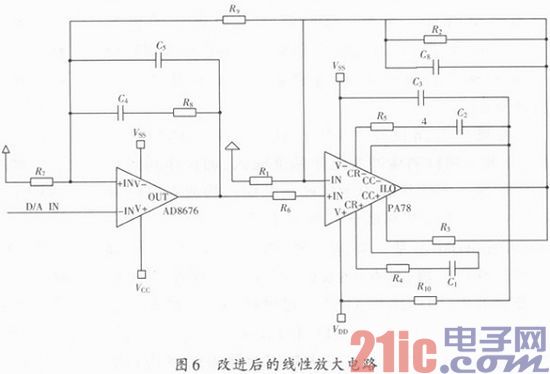
放大電路的設(shè)計(jì)中采用有源模擬PI控制器,改進(jìn)后的線性放大電路如圖6所示。其中PI控制器的放大器采用AD8676,AD8676的輸入失調(diào)電壓低于50μV(滿溫度行程下),電壓噪聲≤0.04μV(P-P)@0.1~10 Hz,因此適合用于串聯(lián)校正環(huán)節(jié),以提高系統(tǒng)穩(wěn)態(tài)性能、減小輸出電壓漂移。
3.3 相位補(bǔ)償
從工程角度考慮,由于干擾源的存在,會(huì)使系統(tǒng)的穩(wěn)定性發(fā)生變化,導(dǎo)致系統(tǒng)發(fā)生震蕩。因此保證控制系統(tǒng)具有一定的抗干擾性的方法是使系統(tǒng)具有一定的穩(wěn)定裕度即相角裕度。
由于實(shí)際電路中存在雜散電容,其中放大器反向輸入端的對(duì)地電容對(duì)系統(tǒng)的穩(wěn)定性有較大的影響。如圖6所示,采用C5和C6補(bǔ)償反向端的雜散電容。從系統(tǒng)函數(shù)的角度看,即構(gòu)成超前校正,增加開環(huán)系統(tǒng)的開環(huán)截止頻率,從事增加系統(tǒng)帶寬提高響應(yīng)速度。
PA78有兩對(duì)相位補(bǔ)償引腳,通過外部的RC網(wǎng)絡(luò)對(duì)放大器內(nèi)部的零極點(diǎn)進(jìn)行補(bǔ)償。通過PA78的數(shù)據(jù)表可知,PA78內(nèi)部的零極點(diǎn)位于高頻段。根據(jù)控制系統(tǒng)抗噪聲能力的需求,配置RC網(wǎng)絡(luò)使高頻段的幅值特性曲線迅速衰減,從而提高系統(tǒng)的抗干擾能力。圖6中,R4,C1與R5,C2構(gòu)成RC補(bǔ)償網(wǎng)絡(luò)。
此外電路中C3的作用是防止輸出信號(hào)下降沿的振動(dòng)引起的干擾;R10起到偏置電阻的作用,將電源電流注入到放大器的輸出級(jí),提高PA78的驅(qū)動(dòng)能力。
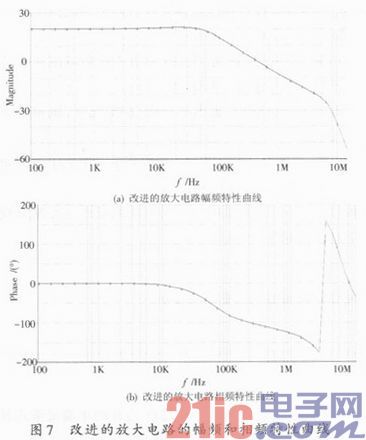
將PI控制器的參數(shù)分別設(shè)置為KP=10、KI=0.02;超前校正補(bǔ)償電容分別為12 pF和220 pF;RC補(bǔ)償網(wǎng)絡(luò)為R=10 kΩ、C=22 pF。利用線性放大電路的Spice模型進(jìn)行仿真得到幅頻特性和相頻特性曲線如圖7所示。從圖中觀察可得,放大系統(tǒng)的帶寬可達(dá)100 kHz,從而保證了系統(tǒng)良好的動(dòng)態(tài)特性,同時(shí)相角裕度γ>60°使系統(tǒng)具有較高的穩(wěn)定性(由于PZT的負(fù)載電抗特性一般呈容性,所以留有較大的相角裕度十分必要)。








評(píng)論