基于LPC2119和μC/OSII 的CAN中繼器設計

基于提高CAN總線組網能力的考慮,提出一種新穎的CAN中繼器設計方法;闡述以LPC2119控制器為核心的硬件設計方案;詳細分析在μC/OSII實時操作系統下的軟件實現過程;針對中繼器的實時性和安全性以及總線與總線之間可能存在的速度不匹配的問題,確立提升緊急任務優先級、建立相關事件標志、合理地對事件與任務進行同步的改進方法,從而有效地解決組網中最遠傳輸距離和最大節電數限制的問題。
本文引用地址:http://www.104case.com/article/201610/305789.htm引 言
CAN總線的直接通信距離只有10 km左右,而且由于收發器驅動能力的限制,總線上最多只能掛110個節點,給系統組網帶來一定的困難。CAN中繼器就是為了解決這個問題而設計的。由于中繼器具有數據轉發功能,不僅可以擴大通信距離,還可以增加節點的最大數目。對CAN中繼器初始化參數進行設置,可以在不同的網段內采用不同的通信速率,還可以對報文進行過濾,減輕總線負擔。
1 CAN中繼器的硬件設計
1.1 微控制器LPC2119簡介
CAN中繼器是以ARM微控制器LPC2119為核心的軟硬件系統。LPC2119是Philips公司生產的一款基于支持實時仿真和跟蹤的16/32位ARM7TDMISMCU,帶有128 KB嵌入的高速Flash存儲器。獨特的加速結構使32位代碼能夠在最大時鐘速率下運行。對代碼規模有嚴格控制的應用可使用16位Thumb模式將代碼規模降低超過30 %,而性能的損失卻很小。LPC2119內部集成2個CAN控制器。它的主要特性有:單個總線上的數據傳輸速率高達1 Mb/s;32位寄存器和RAM訪問;兼容CAN 2.0B, ISO 118981規范;全局驗收濾波器可以識別所有的11位和29位Rx標識符;驗收濾波器為選擇的標準標識符提供Full CANstyle自動接收。
1.2 LPC2119內部CAN控制器與SJA1000比較
LPC2119內部集成的CAN控制器與Philips公司的SJA1000 CAN控制器相比較大致相同,只是在驗收濾波這一環略有不同,這為習慣SJA1000的開發人員采用LPC2119提供了方便。SJA1000驗收濾波器由驗收代碼寄存器和驗收屏蔽寄存器定義,要接收報文的位模式在驗收代碼寄存器中定義,相應的驗收屏蔽寄存器允許定義某些位為“無關”,通過模式寄存器可以選擇不同的過濾模式:單過濾模式和雙過濾模式。
而對LPC2119內部集成的CAN控制器,全局驗收過濾器包含一個512×32(2 KB)的RAM,通過軟件處理,可在RAM中存放1~5個標識符表格,整個RAM可容納1024個標準標識符或512的擴展標識符或兩種類型混合的標識符。同時有5個地址寄存器指向驗收過濾器RAM的表格:Full CAN標準地址,標準單個地址,標準地址范圍,擴展單個地址或擴展地址范圍。當CAN控制器的接收端已接收到一個完整的標識符時,它將通知驗收過濾器,驗收過濾器響應這個信號,并讀出控制器編號、標識符尺寸,以及來自控制器本身的標識符,然后通過驗收過濾器搜索RAM中的表格,以決定接收或放棄這一幀信息。
1 .3 CAN中繼器硬件結構
中繼器的硬件結構框圖如圖1所示。LPC2119分別通過CAN總線收發器與兩路總線相連;總線驅動器采用帶隔離的DC/DC模塊單獨供電,不僅實現了兩路CAN接口之間的電器隔離,也實現了中繼器與CAN總線的電器隔離。除此之外,還有LED顯示和鍵盤接口。LED用于顯示中繼器的工作狀態,鍵盤用來修正總線的波特率。最終程序的調試與跟蹤通過JTAG調試口完成。
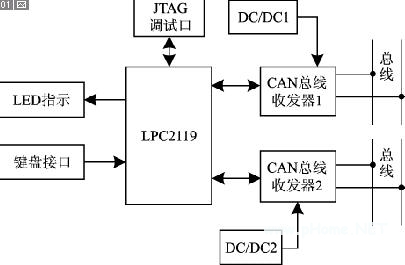
圖1硬件結構框圖
2 系統軟件設計
2.1 引入μC/OSII實時操作系統
隨著應用的復雜化,采用傳統前后臺設計方法,會顯得過于復雜,實時性得不到保證,而且容易發生死鎖。解決這些問題的最好方法就是采用實時操作系統。
μC/OSII完全是占先式的實時內核, 是基于優先級的, 即總是讓就緒態中優先級最高的任務先運行, 因此實時性比非占先式的內核要好。 它包含了實時內核、任務管理、時間管理、任務間通信同步(信號量、郵箱、消息隊列) 和內存管理等功能; 它的絕大部分代碼是用C 語言編寫的, 可移植性強, 可以在絕大多數8 位、16 位、32 位以至64 位微處理器、微控制器、數字信號處理器(DSP) 上運行。
CAN中繼器對系統的實時性和可靠性要求比較高。采用μC/OSII實時操作系統可以有效地對任務進行調度;對各任務賦予不同的優先級可以保證任務及時響應,而且采用實時操作系統,降低了程序的復雜度,方便程序的開發。
2.2 軟件設計中需考慮的問題
(1) 使用代碼的容量
在前/后臺系統的設計中,對存儲器容量的需求僅僅取決于應用程序代碼,而使用RTOS的情況則很不一樣。RTOS 內核本身需要額外的代碼空間。
總代碼量=應用程序代碼+內核代碼
每個任務都是獨立運行的,必須給每個任務提供單獨的棧空間(RAM)。在決定分配給每個任務多少棧空間時,應該盡可能使之接近實際的需求量。棧空間的大小不僅要計算任務本身的需求(局部變量、函數調用等) ,還需要計算最多中斷嵌套層數(保存寄存器、中斷服務程序中的局部變量等)。內核的另一個應該具有的特性是,每個任務所需的棧空間大小可以分別定義。所有內核都需要額外的棧空間,以保證內部變量、數據結構、隊列等。如果內核支持中斷用棧分離,則總的RAM需求量的表達式為:RAM總需求=應用程序RAM 需求+內核數據區RAM需求+各任務棧需求的總和+最多中斷嵌套棧需求。
除非有特別大的RAM空間可以使用,對棧的分配與使用均要特別小心。實時多任務系統比前后臺系統需要更多的代碼(ROM) 和數據空間(RAM) 。額外的代碼空間取決于內核的大小,而RAM的用量則取決于系統中的任務數。
(2) 實時性和安全性
CAN中繼器是系統組網的關鍵設備之一,在稍大型的CAN總線系統中經常會用到中繼器。它給系統組網帶來方便的同時,也給系統增加了一些存儲轉發時延,因此在軟件設計中必須考慮系統的實時性,盡量縮短數據的存儲轉發時間。這除了要求給系統數據轉發任務分配較高的優先級之外,還應建立一種通信機制,保證在收到一路總線上的數據時,能即時向另一路總線發送。另外,中繼器是兩路總線之間通信的橋梁,為了保證兩路總線之間正常的通信,應盡量避免類似死鎖、總線故障之類的情況發生。所以系統必須設計一個監控任務,能對這類情況作出即時反應,同時為了不丟失還未轉發的數據,必須為每一路總線設置一環形緩沖區,用于存放新接收到的數據,維護系統的安全性。

![IAR 使用 [利爾達]](http://editerupload.eepw.com.cn/201003/41125f2f23fc00d2cee647097da2b73d.jpg)


評論