基于ARM-Linux嵌入式系統的多進程并發服務器設計

bind (listen_fd,(struct sockaddr*)client_addr,sizeof(client_addr))
當調用socket0函數創建一個套接字時,默認情況下它是一個主動套接字。所以對于TCP服務器,在綁定操作后,必須要調用listen0函數,將這個未連接的套接字轉換。
成被動套接字,使它處在監聽模式下,指示內核應接受發向該套接字的連接請求。在調用listen0函數后,服務器的狀態從close轉換到listen狀態。Listen第二個狀態字代表的是最大連接數,本系統設置的最大連接數為10。
listen(listen_fd,10);
接受客戶連接,客戶協議地址和長度省略接收,失敗accept_fd=-1,置errno。如果建立連接。并且fork0=0,那么程序就進入子進程進行執行。
accept_fd=accept(listen_fd,NULL,NULL);
清除一個文件描述符集,并將一個新文件描述符加入文件描述符集中,其作用就是更新文件描述符。
FD_ZERO(fds);
FD_SET(aecept_fd,fds);
函數select0是給出每個描述符我們所關心的條件:是否讀描述符、是否想寫描述符、是否描述符的異常條件。tv指等待時間。FD_ISS ET()測試該集中的一個給定位是否有變化、更新。
retval=select(accept_fd+1,fds,NULL,NULL,tv);
FD_ISSET(accept_fd,fds)
調用read0可以接收buffer數據緩沖區,1 024指接收數據緩沖區大小,n為接收字節數。
n=read(aecept_fd,buffer,1 024);
調用子程序modbus.c,執行相應操作,調用make_modbus_ack0生成回發數據,并通過send0回發給客戶端。
send_count=make_modbus_ack(buffer,n);
send(accept_fd,buffer,send_count,0)
3 ARM-Linux多進程服務移植與實現
3.1 程序編譯移植
Makefile的作用就是讓編譯器知道要編譯一個文件需要依賴哪些文件,同時當那些依賴文件更新時,編譯器會自動發現最終生成的文件已經過時,而重新編譯相應模塊。Makefile定義了一系列規則來指定各文件,如依賴性、先后順序及是否需要更新等。
ARM平臺上的Makefile
CROSS=arm-linux-
arm-modbus-server.main.c modbus.c
$(CROSS)gcc-o arm-modbus-server main.c modbus.c
clean:
rm-vf*.o
編譯譯基于ARM的modbus網絡程序如下圖,首先我們看到文件夾里沒有可執行文件arm-modbus-server,輸入:#make
執行Makefile文件,進行編譯連接依賴文件:main.c、modbus.c、std_c.h。
然后生成我們所需要的文件arm-modbus-server。
3.2 并發服務器測試
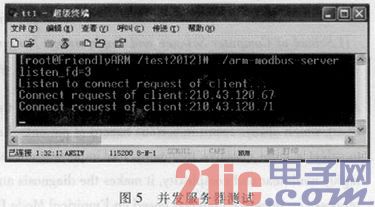
本測試是基于ARM9的linux2.9內核平臺。首先使用chmod修改arm-modbus-server執行權限,然后運行./arm-modbus-server即服務器程序已經啟動。
啟用兩個客戶端通過IP訪問服務器,可見如圖5所示,已顯示并發服務器運行正常。
4 結論
本文詳細介紹了并發服務器的原理結構,分析了基于linux下的并發服務器程序代碼,并且移植到ARM平臺上運行,實現了小型嵌入式服務器的制作。這種低成本、低噪聲、低功耗、高穩定性、高安全性的嵌入式服務器,將在我們信息化發展中的智能樓宇、智能家電、智能移動設備中獲得應用。










評論