基于Zigbee的船舶狀態(tài)監(jiān)控系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)

船舶狀態(tài)監(jiān)控系統(tǒng)是現(xiàn)代船舶自動(dòng)化的一個(gè)重要標(biāo)志,可分為機(jī)艙內(nèi)監(jiān)控和機(jī)艙外監(jiān)控。機(jī)艙內(nèi)船舶主要機(jī)械設(shè)備的工作狀態(tài)以及機(jī)艙外船舶的運(yùn)行環(huán)境是否正常,直接關(guān)系著整個(gè)船舶能否正常運(yùn)行,因而對(duì)船舶相關(guān)機(jī)械設(shè)備和環(huán)境的重要參數(shù)(溫度,壓力,氣體濃度等)進(jìn)行實(shí)時(shí)監(jiān)控具有重要意義。目前的船舶監(jiān)控模式基本為有線式的集中監(jiān)控,而利用無(wú)線傳感網(wǎng)絡(luò)節(jié)點(diǎn)來(lái)替代傳統(tǒng)的有線的傳感網(wǎng)絡(luò)節(jié)點(diǎn)進(jìn)行相關(guān)的監(jiān)測(cè)和控制工作,能夠有效的解決由于船舶空間的復(fù)雜性造成的布線困難、不易維護(hù)等技術(shù)難點(diǎn),此外還降低了施工人員的工作強(qiáng)度以及工程成本。因此,利用Zigbee無(wú)線技術(shù)進(jìn)行監(jiān)控,相比與有線監(jiān)控技術(shù)具有許多技術(shù)優(yōu)勢(shì)。
本文引用地址:http://www.104case.com/article/201609/304009.htm1 Zigbee技術(shù)簡(jiǎn)介
Zigbee是一種新興的基于IEEE802.15.4無(wú)線標(biāo)準(zhǔn)開(kāi)發(fā)的近距離、低復(fù)雜度、低成本、低功耗、自組織的無(wú)線組網(wǎng)通信技術(shù),以2.4 GHz為主要頻段,采用擴(kuò)頻技術(shù)。每個(gè)具有完整功能的Zigbee節(jié)點(diǎn)有兩種功能:與監(jiān)控對(duì)象(如傳感器節(jié)點(diǎn))直接進(jìn)行連接,來(lái)完成數(shù)據(jù)的采集和監(jiān)控任務(wù);此外還有簡(jiǎn)單的路由中轉(zhuǎn)功能,在自己信號(hào)覆蓋的范圍內(nèi),與網(wǎng)絡(luò)中其它的承擔(dān)中轉(zhuǎn)任務(wù)的多個(gè)節(jié)點(diǎn)進(jìn)行無(wú)線連接。由于其架構(gòu)簡(jiǎn)單,再加上節(jié)點(diǎn)體積小,且能自動(dòng)組網(wǎng),因此網(wǎng)絡(luò)布局十分簡(jiǎn)單方便;再加上大量的節(jié)點(diǎn)能進(jìn)行群體協(xié)作,網(wǎng)絡(luò)本身具有很強(qiáng)的自愈能力,任何一個(gè)節(jié)點(diǎn)的損壞都不會(huì)對(duì)整體任務(wù)的完成造成致命性的影響,非常適合用來(lái)組建無(wú)線傳感網(wǎng)絡(luò)l引。由于這些特點(diǎn),Zigbee技術(shù)在將來(lái)的工業(yè)控制、家庭自動(dòng)化、汽車(chē)自動(dòng)化、樓宇自動(dòng)化、消費(fèi)電子、醫(yī)用設(shè)備等領(lǐng)域發(fā)揮的作用會(huì)越來(lái)越突出。
Zigbee協(xié)議標(biāo)準(zhǔn)采用分層結(jié)構(gòu),每一層為其上層提供特定服務(wù):數(shù)據(jù)服務(wù)實(shí)體和管理實(shí)體分別提供數(shù)據(jù)傳輸服務(wù)和其他管理服務(wù)。協(xié)議棧中的每一層都通過(guò)服務(wù)訪問(wèn)點(diǎn)(SAP)
向上層提供相應(yīng)的服務(wù),每個(gè)SAP通過(guò)服務(wù)原語(yǔ)來(lái)實(shí)現(xiàn)對(duì)應(yīng)的功能。Zigbee聯(lián)盟在IEEE802.15.4標(biāo)準(zhǔn)定義的物理層(PHY)和媒體訪問(wèn)控制層(MAC)的基礎(chǔ)上定義了網(wǎng)絡(luò)層(NWK)、應(yīng)用層(APL)以及安全服務(wù)規(guī)范。應(yīng)用層由應(yīng)用框架(AF)、應(yīng)用支持子層(APS)、Zigbee設(shè)備對(duì)象(ZDO)以及用戶自定義的應(yīng)用對(duì)象組成。用戶可以在這個(gè)標(biāo)準(zhǔn)的基礎(chǔ)上開(kāi)發(fā)所需的應(yīng)用。
2 系統(tǒng)總體架構(gòu)設(shè)計(jì)
系統(tǒng)主要由Zigbee終端設(shè)備節(jié)點(diǎn)(傳感器節(jié)點(diǎn))、路由設(shè)備節(jié)點(diǎn)、協(xié)調(diào)器節(jié)點(diǎn)和上位機(jī)監(jiān)控系統(tǒng)組成,整體結(jié)構(gòu)圖如圖1所示。基于Zigbee的船舶狀態(tài)監(jiān)控系統(tǒng)的主要功能就是將船舶的傳感信息參數(shù)數(shù)據(jù)采集至Zigbee終端設(shè)備節(jié)點(diǎn),終端設(shè)備節(jié)點(diǎn)通過(guò)無(wú)線網(wǎng)絡(luò)把采集到的數(shù)據(jù)傳輸?shù)絑igbee路由器節(jié)點(diǎn),路由器節(jié)點(diǎn)主要承擔(dān)數(shù)據(jù)接力功能,然后路由器節(jié)點(diǎn)將轉(zhuǎn)發(fā)過(guò)來(lái)的數(shù)據(jù)通過(guò)無(wú)線網(wǎng)絡(luò)傳輸?shù)絑igbee協(xié)調(diào)器節(jié)點(diǎn),最后協(xié)調(diào)器節(jié)點(diǎn)利用串行接口把數(shù)據(jù)傳送至上位機(jī)監(jiān)控系統(tǒng)。
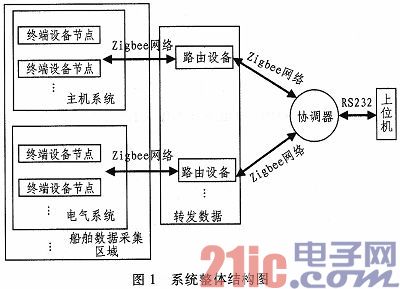
上位機(jī)系統(tǒng)部分是本系統(tǒng)的人機(jī)交互界面,主要負(fù)責(zé)數(shù)據(jù)的分析和顯示;協(xié)調(diào)器負(fù)責(zé)整個(gè)網(wǎng)絡(luò)的建立與管理,通過(guò)串口把終端設(shè)備采集到的數(shù)據(jù)傳送到上位機(jī);路由器主要負(fù)責(zé)數(shù)據(jù)的轉(zhuǎn)發(fā),從而擴(kuò)大網(wǎng)絡(luò)的覆蓋發(fā)范圍;終端設(shè)備節(jié)點(diǎn)主要負(fù)責(zé)現(xiàn)場(chǎng)數(shù)據(jù)的收集,并把數(shù)據(jù)傳到路由器或協(xié)調(diào)器。協(xié)調(diào)器能與多個(gè)終端設(shè)備進(jìn)行直接通信,路由器節(jié)點(diǎn)主要是起到多跳路由作用。由于船舶機(jī)艙環(huán)境復(fù)雜,無(wú)線信號(hào)極容易受到障礙物的阻擋,因此這就要求無(wú)線通信能實(shí)現(xiàn)多跳功能。所謂多跳無(wú)線通信就是指利用全功能節(jié)點(diǎn)的路由轉(zhuǎn)發(fā)功能,將數(shù)據(jù)通過(guò)轉(zhuǎn)發(fā)從而達(dá)到要求的傳輸距離或避開(kāi)障礙物。Zigbee協(xié)議棧存在路由功能,只需在節(jié)點(diǎn)載入?yún)f(xié)議棧的路由程序,采用樹(shù)形或網(wǎng)狀的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)就可實(shí)現(xiàn)多跳的無(wú)線通信。本文的設(shè)計(jì)重點(diǎn)是介紹Zigbee無(wú)線傳感網(wǎng)絡(luò)在船舶上的具體實(shí)現(xiàn),因此將不討論上位機(jī)的用戶界面的具體設(shè)計(jì)。
3 系統(tǒng)硬件設(shè)計(jì)
本設(shè)計(jì)的硬件核心部分為T(mén)I公司生產(chǎn)的CC2530芯片。CC2530能以很低的材料成本以及很簡(jiǎn)單的外部電路設(shè)計(jì)建立起非常強(qiáng)大的無(wú)線傳感網(wǎng)絡(luò)節(jié)點(diǎn),而且還不用考慮射頻電路的設(shè)計(jì),它集成了一個(gè)高性能的RF(射頻天線)收發(fā)器、一枚業(yè)界標(biāo)準(zhǔn)的增強(qiáng)型8501微控制器內(nèi)核(MCU)以及有8K的RAM,支持四種不同版本的Flash存儲(chǔ)器(32/64/128/256KB)擁有強(qiáng)大的五通道DMA,CSMA/CA硬件支持,AES加密安全協(xié)處理器,兩個(gè)通用同步串口,支持多種串行通信協(xié)議。協(xié)調(diào)器在整個(gè)網(wǎng)絡(luò)中處理的數(shù)據(jù)最多,職責(zé)最重,因此協(xié)調(diào)器選擇使用存儲(chǔ)器是256K的CC2530芯片。由于CC2530有多種不同的運(yùn)作模式和真正的片上系統(tǒng)(Soc)解決方案,使得很適合用在低功耗的系統(tǒng)中,而且不需要國(guó)語(yǔ)復(fù)雜的外圍電路。
3.1 協(xié)調(diào)器節(jié)點(diǎn)和路由器節(jié)點(diǎn)硬件設(shè)計(jì)
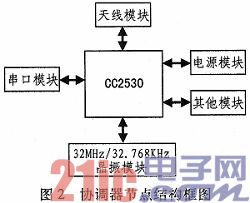
協(xié)調(diào)器與路由器的硬件模塊基本相同,最大的不同就是路由節(jié)點(diǎn)沒(méi)有串口電路,以下只介紹協(xié)調(diào)器的硬件設(shè)計(jì)。協(xié)調(diào)器節(jié)點(diǎn)是由CC2530芯片與串口模塊組成,本設(shè)計(jì)的串口
模塊選用的是MAX3232芯片來(lái)完成RS232串口數(shù)據(jù)的電平轉(zhuǎn)換。此外協(xié)調(diào)器節(jié)點(diǎn)還包括電源模塊、射頻天線(RF)模塊以及晶振電路等模塊。電源模塊用于為協(xié)調(diào)器節(jié)點(diǎn)的其它功能模塊供電,保證節(jié)點(diǎn)的正常運(yùn)行,供電電壓為2.0~3.6V之間。RF模塊主要用于數(shù)據(jù)的無(wú)線收發(fā)和傳送。晶振模塊是兩個(gè)不同頻率的晶振,分別用于無(wú)線收發(fā)數(shù)據(jù)和休眠狀態(tài)。協(xié)調(diào)器節(jié)點(diǎn)硬件的結(jié)構(gòu)框圖如圖2所示。
3.2 終端設(shè)備節(jié)點(diǎn)硬件設(shè)計(jì)
在監(jiān)控系統(tǒng)中,分布最廣數(shù)量最多的就是終端設(shè)備節(jié)點(diǎn),主要負(fù)責(zé)對(duì)船艙重要數(shù)據(jù)的收集與傳送。終端設(shè)備節(jié)點(diǎn)由處理器模塊(CC2530)、電源模塊、射頻天線(RF)模塊、晶
振電路模塊以及傳感器單元等模塊組成。傳感器單元模塊主要是一些溫度,濕度,氣體濃度,壓力等傳感器。另外為保證終端節(jié)點(diǎn)設(shè)備的靈活性,電源的供電方式一般采用兩節(jié)電池供電,因?yàn)镃C2530的工作電壓在2~3.6 V,而兩節(jié)電池的電壓一般在3 V左右,因此完全能滿足其工作電壓。不過(guò)對(duì)于部分對(duì)工作電壓要求高的傳感器,電池電壓達(dá)不到其工作的最低標(biāo)準(zhǔn)時(shí),可以使用外部直流電源為其供電。終端設(shè)備節(jié)點(diǎn)硬件的結(jié)構(gòu)框圖如圖3所示。











評(píng)論