DSP和ARM的音圈電機(jī)伺服控制系統(tǒng)設(shè)計

2.3.1 DSP主程序
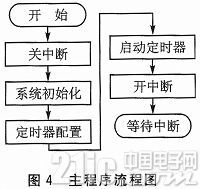
DSP主程序主要完成系統(tǒng)的初始化、定時器中斷配置、啟動定時器、等待定時器中斷。系統(tǒng)初始化包括時鐘初始化、外設(shè)初始化、中斷服務(wù)程序初始化等。當(dāng)定時器中斷產(chǎn)生時,程序轉(zhuǎn)向執(zhí)行中斷,完成位置控制算法。定時器時間即位置控制算法的調(diào)節(jié)周期,根據(jù)實時位置的采樣周期來確定。定時器時間若設(shè)置過短,頻繁的調(diào)節(jié)會造成系統(tǒng)的不穩(wěn)定;若過長,則無法達(dá)到好的調(diào)節(jié)效果,本實驗中定時器時間選擇為采樣周期的4倍。主程序流程圖如圖4所示。
2.3.2 定時器T0中斷程序
定時器T0中斷程序主要完成位置環(huán)的計算。根據(jù)課題中音圈電機(jī)系統(tǒng)的特點,位置環(huán)采用積分分離式比例和積分(PI)控制算法,為減小累計誤差對系統(tǒng)的影響,采用增量式PI控制。
位置調(diào)節(jié)器的輸出可表示為:
△Pn=Pn-Pn-1=KP(en-en-1)+βKIen
其中KP、KI分別為位置調(diào)節(jié)器的比例、積分系數(shù);en為第n次采樣的偏差;
為積分項的開關(guān)系數(shù),ε為根據(jù)實際情況設(shè)定的積分分離閾值。
當(dāng)電機(jī)的實際位置與給定期望位置的誤差小于一定值時,再恢復(fù)積分校正環(huán)節(jié),以便消除系統(tǒng)的穩(wěn)態(tài)誤差,保證伺服電機(jī)位置控制的精度。
3 實驗結(jié)果
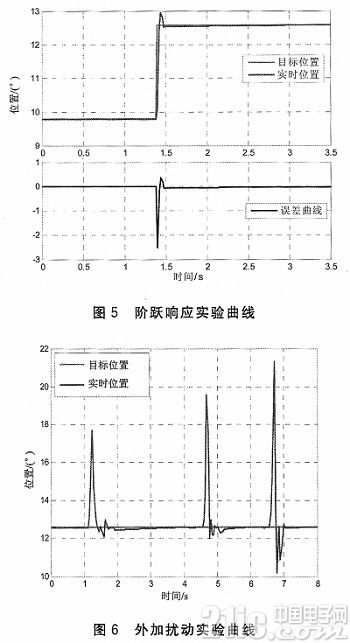
DSP+ARM雙核控制器硬件電路經(jīng)過測試可用,并在控制器上實現(xiàn)了相關(guān)控制算法,驗證了算法的可行性,系統(tǒng)響應(yīng)速度快,穩(wěn)態(tài)精度高。據(jù)統(tǒng)計,穩(wěn)態(tài)精度能達(dá)到30 s。圖5為階躍響應(yīng)實驗曲線。圖6表明,系統(tǒng)受到外界干擾后能迅速恢復(fù)到原平衡位置,抗干擾能力強(qiáng)。
結(jié)語
本文提出了一種基于浮點DSP和ARM的音圈電機(jī)驅(qū)動控制器,完成了用于激光定位和掃描的音圈電機(jī)位置伺服控制。實驗結(jié)果表明,系統(tǒng)具有較好的穩(wěn)、動態(tài)性能以及抗干擾能力,可以滿足系統(tǒng)的要求。通過功能的合理劃分,實現(xiàn)了資源的合理配置;ARM的運(yùn)用,大大簡化了硬件設(shè)計,分擔(dān)了DSP的計算任務(wù),保證了控制系統(tǒng)的實時性。











評論