基于CAN總線的汽車前照燈多路傳輸系統

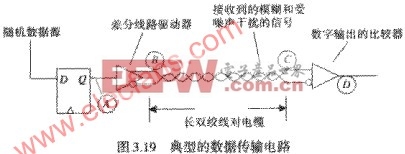
82C250 與CAN 總線的接口部分采用了一定的安全和抗干擾措施。82C250 的CANH 和CANL 引腳各自通過一個5 的電阻與CAN 總線相連, 電阻可起到一定的限流作用, 保護82C250 免受過流的沖擊。
CANH 和CANL 與地之間并聯了2 個30 pF 的小電容, 可以起到濾除總線上的干擾和一定的防電磁輻射的能力。82C250 的Rs 腳上接有一個斜率電阻, 電阻大小可以根據總線通信速度適當調整, 一般在16~ 140 k 。
2. 3 微處理器的選擇
汽車電子控制系統的實時性是建立在微處理器的高速運算功能上的, 因此微處理器的選擇是系統設計的重要環節, 與一般的電子設備相比較, 汽車電子控制系統的微處理器特點在于經常處理大量的輸入和輸出信號, 而且要實現高精度和實時控制, 因此必須能夠同時進行多種獨立的操作。為了滿足這些要求, 微處理器必須具有高速計算、高速實時輸入和輸出以及多種中斷響應等特性。由于通用電子計算機電子控制系統的控制功能較為簡單, 所以大多數電子控制單元( ECU ) 中主要使用8 位微處理器。在選擇微處理器上, 不僅要注重滿足技術要求, 還要綜合考慮成本和實用因素, 不應片面追求微處理器的高速和高位數。
本研究是對按鈕開關的邏輯信號進行處理, 對微處理器的控制核心CPU 的要求不高, 選用AT89C51 即可滿足要求。
基于CAN總線的汽車前照燈多路傳輸系統
3 汽車前照燈CAN 總線多路傳輸系統的軟件設計
多路傳輸系統的軟件設計包括CAN 節點的初始化、CAN 報文的發送和接收、PC 機與CAN 適配卡的通信。
3. 1 初始化
系統節點初始化包括: 自檢、CAN 通訊初始化、A/ D初始化、各種系統標志初始化以及看門狗初始化等。其中89C51 的CAN 控制器初始化流程如圖4所示。
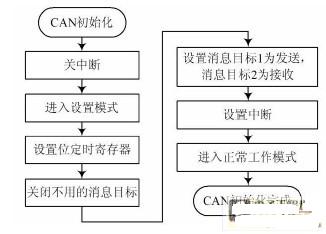
圖4 CAN 初始化流程圖。
3. 2 CAN 子節點收發軟件設計
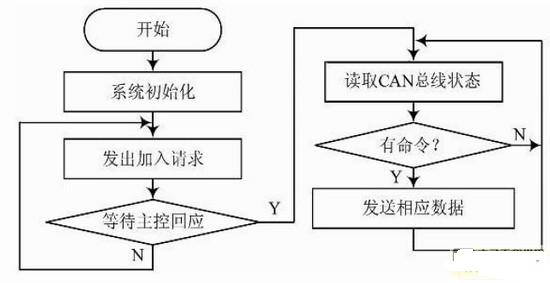
子節點主要功能是實現對按鍵信號進行采集, 并響應主控節點命令, 通過CAN 總線向主控節點發送檢測點信息。在軟件設計上, 子節點采取命令應答方式, 即等待命令—分析命令類型—發回相應數據。
系統中子節點在上電復位后主要工作為:
( 1) 對系統進行初始化;( 2) 向主控節點發出加入請求;( 3) 主控節點接受請求, 并給該子節點一個網絡編號;( 4) 等待主控節點命令;( 5) 根據命令將監測點的相關數據通過CAN 總線發送給主控節點。
因此, 子節點的主要流程如圖5 所示。
3. 3 主控節點軟件設計
主控節點軟件采用事件驅動方式, 事件信號由各種中斷信號產生; CPU 在進入中斷處理程序后, 僅僅判斷事件類型, 設置相應的事件標志位, 并不對事件做任何處理; 主控節點主程序將循環讀取事件標志, 并轉入相應的事件處理程序。
主控節點具有兩種工作模式。一種是系統中存在上位機, 上位機作為命令發出點, 主控節點處于被動控制模式。此時, 主控節點的工作是通過RS 232 接收上位機的命令, 分析命令的目的節點, 并將命令通過CAN網絡發送給目的節點; 同時, 主控節點檢測CAN 網絡上的節點數據, 將節點發出的數據通過RS 232 發送給上位機; 重復以上流程直到工作方式發生改變。在這種方式下主控節點的主要工作流程如圖6 所示。
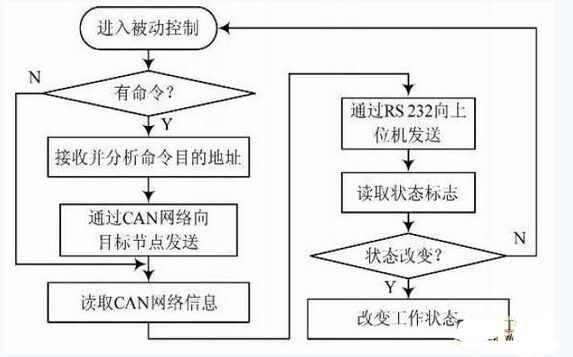
圖6 被動控制狀態流程。
當系統中不存在上位機或上位機發出脫離系統命令后, 主控節點進入主動控制工作模式。在這種狀態中, 命令發送者為主控節點, 主控節點可通過定時器事件輪循查詢各節點工作狀態; 響應鍵盤事件, 并根據用戶輸入的命令向目標節點發出命令或響應相應子節點的數據; 通過LED 燈顯示子節點工作狀態。
兩種工作模式間可以通過上位機發出命令、用戶通過鍵盤輸入命令以及主控節點查詢上位機工作狀態異常( 如在被動狀態中, 上位機長時間沒有命令) 等幾種方式切換。
3. 4 上位機監控系統設計
上位機監控系統基于C+ + 設計, 可以實現同時對多路數據進行采集、存儲, 并設計了圖形化的監控顯示。監控系統功能包括:
( 1) 向主控節點發出聯機或脫機命令, 切換節點工作狀態;( 2) 定時發送節點查詢命令, 查詢子節點工作狀況, 更新系統節點表;( 3) 根據用戶需要, 定時向監控節點發送讀取命令, 取得節點的監控數據, 并保存數據, 形成監控數據文件;( 4) 以圖形化的方式顯示監控曲線。
上位機系統中還包含了數據分析功能, 其中設計了算法接口; 系統用戶可編寫自己的算法庫, 系統可調用用戶算法庫對采集的原始數據進行進一步的分析。
基于CAN總線的汽車前照燈多路傳輸系統
4 結 語
由于CAN 總線具有極強的抗干擾能力, 系統在使用現場數據通訊非常可靠, 并且通過CAN 中繼器可以進一步提高通訊質量和距離。隨著CAN 總線芯片性能的提高、價格的降低, 逐漸應用到普通轎車上, 也為其在農業機械上的應用提供了條件。研究CAN 總線在拖拉機等農業機械上的應用, 對于提高農機性能和經濟性, 促進我國農業機械化發展, 具有重要意義。
基于CAN總線的汽車前照燈多路傳輸系統。







評論