基于CAN總線的汽車前照燈多路傳輸系統

0 引言
本文引用地址:http://www.104case.com/article/201609/303667.htm基于CAN總線的汽車前照燈多路傳輸系統。CAN( Cont ro ller Ar ea Netw ork) 數據總線是一種適用于汽車環境的汽車局域網。它屬于多路傳輸系統中的一種, 是由德國博世( Bosch) 公司在20 世紀80 年代初為解決現代汽車中眾多的控制單元與測試儀器之間的數據交換而應用開發的一種串行通信協議。目前,在汽車設計領域中, CAN 幾乎成了一種必須采用的技術手段, 尤其是在歐洲, 如奔馳、寶馬、保時捷等都采用CAN 總線實現汽車內部控制系統與各檢測和執行機構間的數據通信。此外, 美國汽車廠也將控制器聯網系統逐步由Class2 過渡到CAN。CAN 國際標準只定義了物理層和數據鏈路層, 實際應用中, 一些廠家和公司又定義了相應的應用層規范, 使CAN 的應用更加廣泛和可靠。
基于CAN總線的汽車前照燈多路傳輸系統。CAN 信號傳輸介質為普通雙絞線, 通信速率最高可達1 Mbps/ 40 m, 直接傳輸距離可達10 km/ 5 Kbps。
基于CAN總線的汽車前照燈多路傳輸系統。CAN 的信號傳輸采用短幀結構, 每一幀的有效字節數為8 個, 因而傳輸時間短, 受干擾的概率低, 由于其采用CRC16 的校驗方式, 誤碼率僅為3 10- 5 。當節點嚴重錯誤時, 具有自動關閉的功能, 以切斷該節點與總線的聯系, 使通信線上的其他節點機通信不受影響, 具有較強的抗干擾能力。控制器局部網( CAN) 屬于現場總線范疇, 它是一種有效支持分布式控制或實時控制的串行通訊網絡。
基于CAN總線的汽車前照燈多路傳輸系統。CAN 作為汽車環境中的微控制器通訊, 在車載各電子控制裝置ECU 之間交換信息, 形成汽車電子控制網絡。比如: 發動機管理系統、變速箱控制器、儀表裝備、電子主干系統中, 均嵌入CAN 控制裝置。但是CAN 總線多路傳輸系統還沒有實際應用到汽車前照燈。傳統的汽車系統布線工作量很大, 一旦線路發現故障, 診斷工作十分困難, 同時由于數據傳輸線很長, 導致傳輸速度下降,可靠性、實時性差等問題。CAN 總線技術作為最有前途的現場總線之一, 依靠其可靠性高, 適應環境能力強, 糾錯能力突出, 性價比高等特點成為解決這一問題的新選擇。正是基于這種研究背景, 本文研究并開發出了基于CAN 總線的汽車前照燈多路傳輸系統。
基于CAN總線的汽車前照燈多路傳輸系統。
1 CAN 控制器SJA1000
1. 1 SJA1000 的硬件結構和功能
CAN 的通信協議主要由CAN 控制器完成。CAN控制器主要由實現CAN 總線協議部分和微控制器接口部分組成。不同型號的CAN 總線通信控制器, 實現CAN 協議部分電路的結構和功能大都相同, 而與微控制器接口部分的結構及方式存在一些差異。SJA1000是一種獨立CAN 控制器, 是PHILIPS 公司首推新一代控制器。支持CAN 2. 0B 協議。
SJA1000 的主要特性如下:
器件管腳和電器特性均和PCA82C200 兼容; 時鐘頻率24 MHz; 支持CAN 協議2. 0 標準位速率可達1 Mb/ s;同時支持11 位標識符和29 位標識符; 擴展的接收緩沖器( 增至64 B, PCA82C200 只有20 個字節) ; 對不同微處理器的接口; 可編程的CAN 驅動器輸出。
SJA1000 具有兩種工作模式: 基本模式和Peli 模式。其中基本模式符合CAN 協議2. 0A 標準, 和PCA82C200 兼容。設置時鐘分頻器( CDR: Clock divider Reg ister) 的最高位模式選擇位( CDR. 7) , 可在基本模式和Peli 模式之間切換。
1. 2 CAN 收發器82C250 的硬件結構和功能
82C250 是CAN 控制器與物理總線間的接口, 最初主要應用于汽車高速控制場合。它向總線提供了差動的發送能力, 向CAN 控制器提供了差動的接收能力。
82C250 主要特性如下: 與ISO/ DIS11898 標準兼容; 高速( 最高可達1 Mb/ s) ; 具有抗汽車環境下的瞬間干擾, 保護總線能力; 降低射頻干擾( Radio FrequencyInterference, RFI) 的斜率( slope) 控制; 熱防護; 防護電池與地之間發生短路; 低電流待機方式; 某一個節點掉電不會影響總線; 可有110 個節點相連接。
基于CAN總線的汽車前照燈多路傳輸系統
2 系統硬件電路圖設計
2. 1 汽車前照燈線路示意圖
汽車前照燈傳統供電線路示意圖和汽車前照燈多路總線傳輸系統示意圖如圖1, 圖2 所示。

圖1 汽車前照燈傳統供電線路示意圖

圖2 汽車前照燈多路總線傳輸系統示意圖
2. 2 系統硬件電路原理圖
CAN 智能節點電路圖的設計是本系統的核心, 下面給出詳細的CAN 節點硬件電路設計。
圖3 是汽車汽車前照燈的CAN 總線多路傳輸系統的硬件電路原理圖。從圖中可以看出, 電路主要由三大塊組成。第一塊是前照燈的開關電路部分, 主要包括微控制器89C51 單片機、獨立CAN 通信控制器SJA1000, CAN 總線收發器82C250; 第二塊是上位機,包括CAN 總線適配卡以及數據顯示部分; 第三塊是前照燈的用電器電路部分, 主要包括的也是微控制器89C51 單片機、獨立CAN 通信控制器SJA1000, CAN總線收發器82C250。需要說明一點的是, 本系統用4 個發光二極管來代替具體的汽車前照燈中的近光燈,遠光燈, 示寬燈, 霧燈。
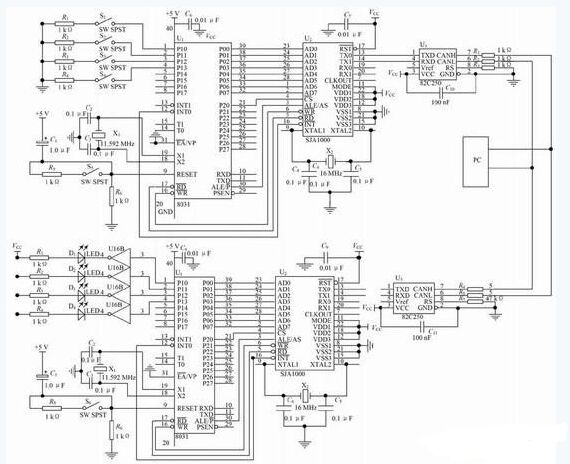
圖3 系統硬件電路原理圖
微處理器89C51 負責SJA1000 的初始化, 通過控制SJA1000 實現數據的接收和發送等通信任務。
SJA1000 的AD0 ~ AD7 連接到89C51 的P0 口,SJA1000 的連接到89C51 的P2. 0, P2. 0 為0 時,CPU 片外存儲器地址可選中SJA 1000, CPU 通過這些地址可對SJA1000 執行相應的讀/ 寫操作。SJA1000的ALE 分別與89C51 的引腳相連, 接89C51 的, 89C51 也可以通過中斷方式訪問SJA1000。







評論