MPU6050和STM32L152的微功耗三維無線鼠標設計

鼠標睡眠狀態:STM32L152工作在睡眠模式(定時器中斷喚醒),MPU6050只有加速度計Z軸工作,電流消耗在200μA左右。
3.5 三維鼠標算法實現
三軸加速度計精度在出廠時便存在工藝誤差,制成MPU6050模塊后還存在安裝誤差等,所以大多數情況下加速度計所測得的值與真實值有所差別,需要進行加速度計標定過程。
(1)加速度計標定方法
標定模型:ai=Kiui+Bi,i=x、y、z,其中ai為加速度計真值,ki為測量斜率,ui為測量值,Bi為零偏。
取多個靜態位置的加速度計測量值,當三軸加速度計靜止時,有如下狀態關系式:
g為當地重力加速度值。將標定模型代入狀態關系式,并作相關變量代換,可得表達式:
其中,pi是與測量斜率ki和零偏bi有關的替換變量。
本文測量20組不同位置的加速度計測量值,并除以對應的系數轉換成以g為單位,分別求取每組中各軸的均值和平方值,代入上式中求出最小二乘解,接著求出標定參數中的斜率和零偏。
(2)MPU6050加速度計不同量程標定及結果
MPU6050加速度計有4種量程,分別是±2g、±4g、±8g、±16g,并且傳感器輸出單位分別是1 6 384 LSB/g、8 192 LSB/g、4 096 LSB/g、2 048 LSB/g,表1給出了±2g、±4g量程標定結果,當地重力加速度取值為9.8。
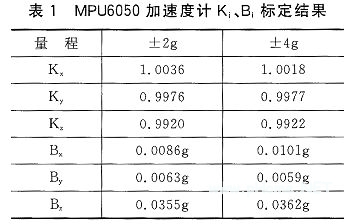
當量程選取±2g時,通過下式計算加速度值:
ai=9.8 Kiui/16 384+Bi
當量程選取±4g時,通過下式計算加速度值:
ai=9.8 Kiui/8 192+Bi
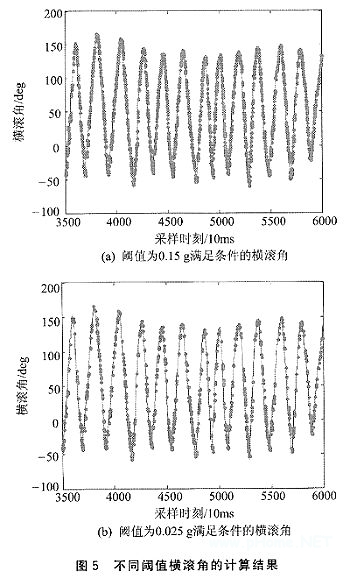
(3)姿態角計算
俯仰角pitch和橫滾角roll的計算公式:
pitch=arcsin(-ay),roll=arctan(-ax/az)
三軸加速度計只有在靜止或勻速運動下,加速度測量合成矢量與重力矢量重合時,才能準確測量姿態角。在測量精度要求不高的情況下,可以通過放寬對合成矢量的要
求,獲得姿態角連續測量。圖5(a)、圖5(b)以橫滾角為例,給出了不同閾值情況下的計算結果,其中黑點和細線分別為滿足于測量閾值條件時的橫滾角度計算值,可見對于三維鼠標,使用0.15g的閾值,能夠滿足連續測量的要求。可靠性判定條件如下:
(4)三維鼠標在屏幕上坐標映射計算
三維鼠標在屏幕上坐標映射的兩種計算方式為:
①旋轉角度判定方向、角度變化映射成坐標位置:加速度傳感器計算橫滾、俯仰兩個傾角θ、ψ,θ角變化表示鼠標在屏幕水平方向移動;ψ角變化表示在屏幕垂直方向移動。角度變化按一個比例系數轉換為鼠標的位移。
②旋轉角度判定方向、加速度積分映射光標位移:鼠標光標在屏幕移動方向的判斷同上。對加速度計動作軸的輸出值在時間軸上積分得到位移,從而得到屏幕映射坐標位置。
結語
從硬件選型到軟件設計都充分考慮了功耗問題,兼顧了三維鼠標操作時的精度、穩定性,克服了傳統鼠標在某些環境不能懸空操作及靈敏度不高的缺點,實現了一款低成本、低功耗、操作簡單、穩定性高的三維鼠標。

相關推薦
-
-
basketj | 2014-03-03
-
dawnjeanh | 2014-07-15
-
-
-
-
i646593001 | 2014-06-21
-
ml418ily | 2014-05-18
-
科泉 | 2014-02-21
-
-
評論